逻辑控制的无环流可逆系统是应用最广泛的可逆系统。
本节将着重讨论逻辑控制的无环流可逆系统的系统结构、控制原理和电路设计。
(一)系统组成和工作原理
1. 系统的组成
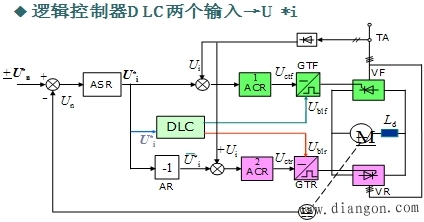
逻辑控制的无环流可逆调速系统(以下简称“逻辑无环流系统”)的原理框图示于下图:

◎ 系统结构的特点
·主电路
① 采用VF、VR反并联线路;
② 由于没有环流,不用设置环流电抗器;
③ 仍保留平波电抗器 L d ,以保证稳定运行时电流波形连续;
·控制系统
① 采用转速、电流双闭环方案;
② 电流环分设两个电流调节器,1ACR用来控制正组触发装置GTF,2ACR控制反组触发装置GTR;
③ 1ACR 的给定信号经反号器 AR 作为2ACR的给定信号,因此电流反馈信号的极性不需要变化,可以采用不反映极性的电流检测方法。
④ 为了保证不出现环流,设置了无环逻辑控制环节DLC,这是系统中的关键环节。它按照系统的工作状态,指挥系统进行正、反组的自动切换,其输出信号 Ublf 用来控制正组触发脉冲的封锁或开放,Ublr 用来控制反组触发脉冲的封锁或开放。
(二)可逆系统对无环流逻辑控制器的要求
◎逻辑装置的任务是:在正组可控硅 VF工作时封锁反组脉冲,在反组可控硅 VF工作时封锁正组脉冲。二者必居其一,决不允许两组同时开放,从而保证主电路没有产生环流的可能。
1. DLC的输入要求
分析V-M系统四象限运行的特性,有如下共同特征:
正向运行和反向制动时,电动机转矩方向为正,即电流为正;
反向运行和正向制动时,电动机转矩方向为负,即电流为负。
因此,应选择转矩信号作为 DLC 的输入信号。
① 用U*i 极性决定工作组别
由于ACR的输出信号正好代表了转矩方向,即有:
·正向运行和反向制动时,U *i= - 正组;
·反向运行和正向制动时,U *i= + 反组。又因为 U*i 极性的变化只表明系统转矩反向的意图,转矩极性的真正变换还要滞后一段时间。只有在实际电流过零时,才开始反向( 以防止造成本桥逆变颠覆),因此,需要检测零电流信号作为 DLC 的另一个输入信号。
② I d=0 决定动作时刻→U io检测零电流信号
逻辑控制器DLC两个输入U *i 、U io
2. DLC的输出要求
·正向运行:VF整流,开放VF,封锁VR;
·反向制动:VF逆变,开放VF,封锁VR;
·反向运行:VR整流,开放VR,封锁VF;
·正向制动:VR逆变,开放VR,封锁VF;
因此,DLC的输出有两种状态:
VF开放 — U blf = 1,VF封锁 — U blf = 0;
VR开放 — U blr = 1,VR封锁 — U blr = 0。
3. 模/数转换
对输入信号U *i 、U io进行转换,将模拟量转换为开关量,由电平检测环节完成。
4. 逻辑判断
根据输入信号,做出正确的逻辑判断。
5. 延时电路
为保证两组晶闸管装置可靠切换,需要有两个延时时间:
① t1延时 封锁— 关断等待时间,以确认电流已经过零,而非因电流脉动引起的误信号;
② t2开放延时 — 触发等待时间,以确保被关断的晶闸管已恢复阻断能力,防止其重新导通。

无环流逻辑控制环节是逻辑无环流系统的关键环节,它的任务是:当需要切换到正组晶闸管VF工作时,封锁反组触发脉冲而开放正组脉冲;当需要切换到反组VR工作时,封锁正组而开放反组。通常都用数字控制,如数字逻辑电路、微机软件、plc等,用以实现同样的逻辑控制关系。


逻辑无环流系统的评价
优点
·省去环流电抗器,没有附加的环流损耗;
·节省变压器和晶闸管装置等设备的容量;
·降低因换流失败而造成的事故。
缺点
·由于( 正组←→反组切换时 )延时造成了电流换向死区;
·过渡过程较慢。
| 
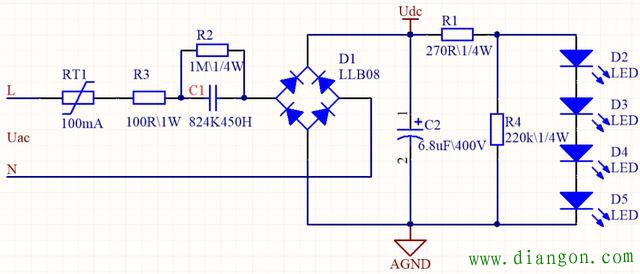 阻容降压电路结构原理图解
阻容降压电路结构原理图解 电子电路的核心是什么?主要传输什么信号?
电子电路的核心是什么?主要传输什么信号? 电工必知整流桥好坏的两种检测方法
电工必知整流桥好坏的两种检测方法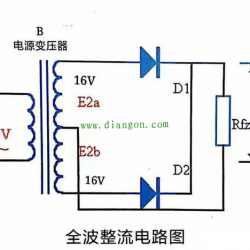 4个二极管整流和2个二极管整流出电压一样吗
4个二极管整流和2个二极管整流出电压一样吗 三分钟带你搞懂运算放大器与比较器的区别
三分钟带你搞懂运算放大器与比较器的区别 PN结为什么可以单向导电?PN结单向导电原理
PN结为什么可以单向导电?PN结单向导电原理



