
|
1. 稳态工作点 |
| 上式表明:转速 n 是由 |
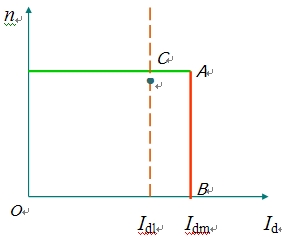 |
| 给定电压U*n决定的。 |
| 表明:U*i(ASR的输出)由负载电流 I dL 决定。 |
 |
| 表明:控制电压 Uct 的大小则同时取决于 n 和 I d,或者说,同时取决于U*n 和 IdL。 以上各式说明:稳态时,PI调节器输出量与输入无关,而是由它后面环节的需要决定的。后面需要PI调节器提供多么大的输出值,它就能提供多少,直到饱和为止。它不同于P调节器的特点。比例环节的输出量总是正比于其输入量。 2. 稳态参数(α 和β )计算: 由于系统无静差,稳态时,PI调节器的输入电压为0(ΔU=0),给定电压与反馈电压相等。 (1)电流环的β ΔU i=0 , U*im=βI dm |
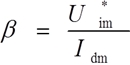 |
| 电流反馈系数 首先确定I dm(电机的过载能力、机械承受冲击力)。然后,可以选择U*im(ASR的输出限幅值),求出β 。或选择β,求U* im 。 (2)转速环的α 转速反馈系数 |
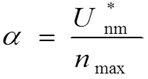 |
| n max —电动机调压时的最高转速。 U* nm —根据运算放大器允许输入电压和稳压电源的情况选定,稳压电源要留有余量。 注:双闭环调速系统的稳态参数计算与单闭环有静差系统(根据D 和 S )完全不同。 |
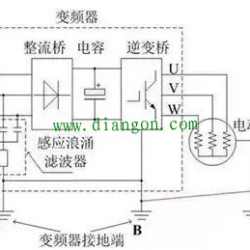 变频器的接线方法图解 教你怎么搞定变频器
变频器的接线方法图解 教你怎么搞定变频器 西门子V20变频器设置步骤
西门子V20变频器设置步骤 变频器过流故障的原因和处理方法
变频器过流故障的原因和处理方法 ABB变频器显示错误代码F0001的原因
ABB变频器显示错误代码F0001的原因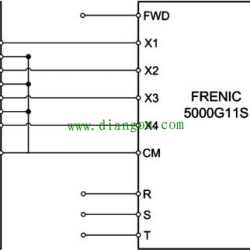 变频器频率调不上去原因和解决方法
变频器频率调不上去原因和解决方法 施耐德变频器通用参数设置步骤
施耐德变频器通用参数设置步骤电工学习网 ( )
GMT+8, 2023-7-20 22:04