2013-6-8 16:13| 编辑:电工学习网| 查看: 17919| 评论: 0
现以相同的机械条件,比较位置与速度两种控制模式,伺服电机运行速度的稳定性。机械传动方式为同步带方式;伺服电机为R88M-G型伺服电机;驱动器为R88D-GT型驱动器;上位机控制器为CP1H-XA型plc。一、 位置控制模式1、 位置控制时的控制接线方式 2、 必要的参数设定:Pn02(控制模式选择) 设定为0。位置控制时主要是通过上位机PLC中的SPED指令设定伺服电机的运行频率。3、 位置控制时,用CX-Drive软件监视伺服电机的速度曲线。如下图: 二、 速度控制模式1、 速度控制时的控制接线方式 2、 必要的参数设定:Pn02(控制模式选择) 设定为1。通过外接0—10V DC信号,由电位器输入到PLC的A/D中,然后由PLC的D/A输出来控制伺服电机运行。3、 速度控制时,用CX-Drive软件监视伺服电机的速度曲线。如下图: 三、 总结根据上述的速度曲线图中的比较,说明位置控制模式下的速度控制比速度模式下的速度控制要稳定。经长时间的生产运行,位置模式控制的速度一直都很稳定,满足的用户的要求。
电工学习网 ( )
GMT+8, 2023-4-21 03:32
Powered by © 2011-2022 www.shop-samurai.com 版权所有 免责声明 不良信息举报
技术驱动未来! 电工学习网—专业电工基础知识、电工技术学习网站。
栏目导航: 工控家园 | 三菱plc | 西门子plc | 欧姆龙plc | plc视频教程

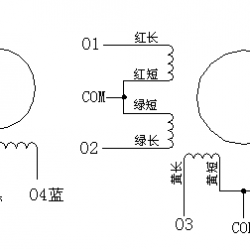 8线步进电机接线方法
8线步进电机接线方法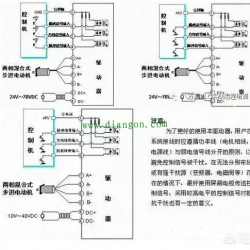 步进电机接线颜色线序定义_步进电机接线图
步进电机接线颜色线序定义_步进电机接线图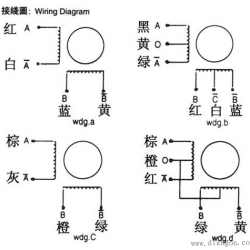 步进电机接线图
步进电机接线图 台达ASD-A2系列伺服驱动器关于AL011报警故
台达ASD-A2系列伺服驱动器关于AL011报警故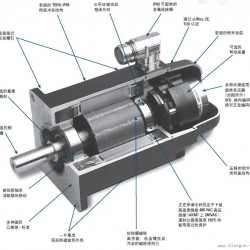 伺服电机的结构图
伺服电机的结构图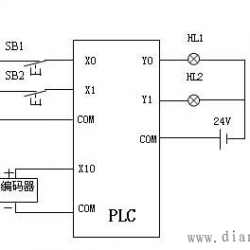 旋转编码器安装接线步骤图解
旋转编码器安装接线步骤图解


