
|
个人认为S7-200和200 SMART的PID参数自整定是很好用的。在阶跃响应曲线几乎和给定值水平线重合时启动自整定。首先计算自整定需要的“滞后”计算,计算完成后开始自调节,调节算法完成后,进入正常的PID控制。 S7-1200/1500的参数自整定分为预调节和精确调节两个阶段。预调节要求 1)设定值和过程值均在组态的极限值范围内。 2)设定值和过程值的差值的绝对值应大于过程值上、下限之差的30%,还应大于设定值的50%。 我用CPU 1516C做与调节实验时与到两个问题。在70%阶跃的给定值产生之后,启动预调节,出现“过程值过于接近设定值”的错误信息(见下图)。其原因是启动的滞后时间较大,过程值上升到接近设定值了。 为了解决这个问题,在产生阶跃设定值后,立即启动预调节,解决了这个问题。
|
 PLC输入端和输出端怎么接线
PLC输入端和输出端怎么接线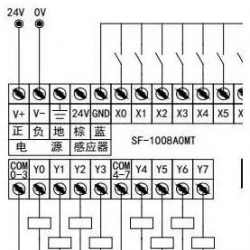 什么是COM端口?PLC中COM端口如何接线?
什么是COM端口?PLC中COM端口如何接线?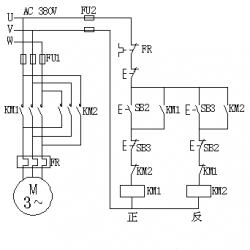 plc控制电动机正反转梯形图
plc控制电动机正反转梯形图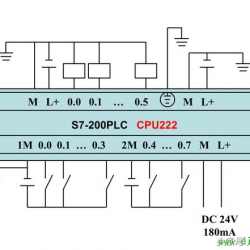 西门子S7-200系列PLC全套接线图
西门子S7-200系列PLC全套接线图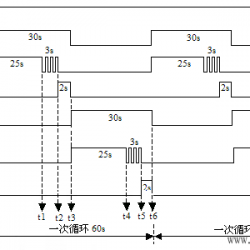 PLC十字路口的交通灯控制编程实例
PLC十字路口的交通灯控制编程实例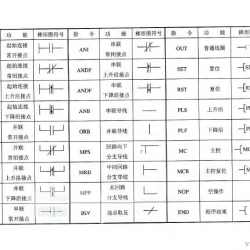 plc基础知识指令27个
plc基础知识指令27个电工学习网 ( )
GMT+8, 2023-4-21 20:18


