|
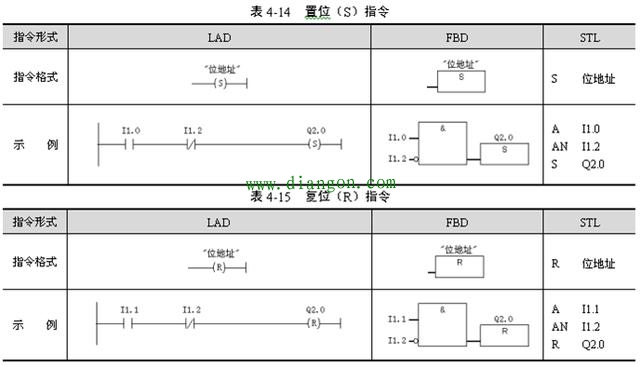
置位(S)和复位(R)指令根据RLO的值来决定操作数的信号状态是否改变,对于置位指令,一旦RLO为“1”,则操作数的状态置“1”,即使RLO又变为“0”,输出仍保持为“1”;若RLO为“0”,则操作数的信号状态保持不变。对于复位操作,一旦RLO为“1”,则操作数的状态置“0”,即使RLO又变为“0”,输出仍保持为“0”;若RLO为“0”,则操作数的信号状态保持不变。这一特性又被称为静态的置位和复位,相应地,赋值指令被称为动态赋值。 PS:解释一下RLO,在西门子S7系列plc中,RLO= “逻辑运算结果”,在二进制逻辑运算中用作暂时存储位。RLO即result of logic operation 状态字的第一位称为逻辑运算结果,该位用来存储执行位逻辑指令或比较指令的结果,RLO的状态为“1”,表示有能流流到梯形图中的运算点处,为“0”则表示无能流流到该点处。
|
 PLC输入端和输出端怎么接线
PLC输入端和输出端怎么接线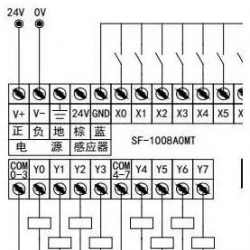 什么是COM端口?PLC中COM端口如何接线?
什么是COM端口?PLC中COM端口如何接线?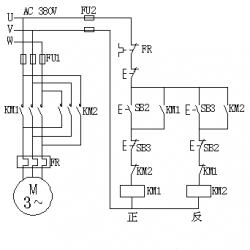 plc控制电动机正反转梯形图
plc控制电动机正反转梯形图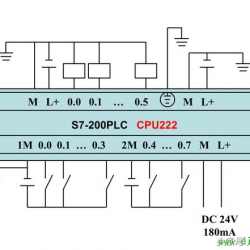 西门子S7-200系列PLC全套接线图
西门子S7-200系列PLC全套接线图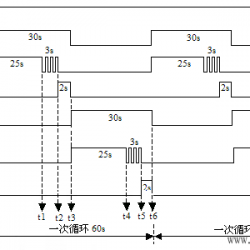 PLC十字路口的交通灯控制编程实例
PLC十字路口的交通灯控制编程实例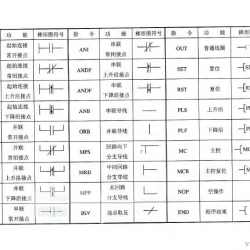 plc基础知识指令27个
plc基础知识指令27个电工学习网 ( )
GMT+8, 2023-3-6 22:14