|
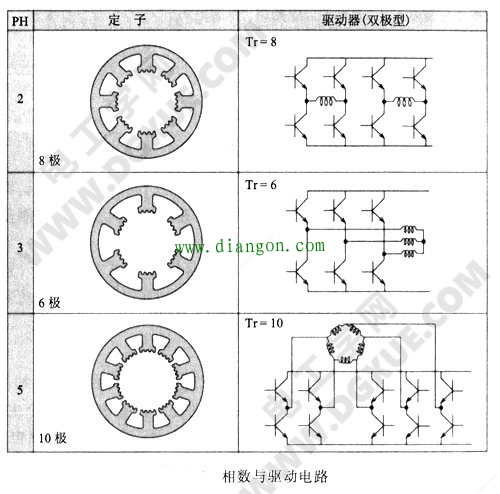
转子不采用永久磁铁的步进电机(VR型或反应式或变磁阻式)很早就在三相步进电机上得到应用。1986年日本伺服公司开发了转子为永久磁铁、定子磁极带有齿的步进电机(在后面会详细介绍磁极齿的设计原理),定、转子齿距的配合,可以得到更高的角分辨率和转矩。三相步进电机定子线圈的主极数为三的倍数,故三相步进电机的定子主极数为3、6、9、12 等。 转子不采用永久磁铁的步进电机(VR型或反应式或变磁阻式)很早就在三相步进电机上得到应用。1986年日本伺服公司开发了转子为永久磁铁、定子磁极带有齿的步进电机(在后面会详细介绍磁极齿的设计原理),定、转子齿距的配合,可以得到更高的角分辨率和转矩。三相步进电机定子线圈的主极数为三的倍数,故三相步进电机的定子主极数为3、6、9、12 等。 下图为不同相数的步进电机典型定子结构和驱动电路的比较,其中忽略了转子结构图。假设转子均为PM型或HB型,并且依据定子为两相、三相、五相等配备相应的转子。定子采用不产生不平衡电磁力(在后面会详细介绍,转子径向吸引力的和不能完全互相抵消,产生剩余径向力)的最小主极数结构,即两相为4个主极、三相为3个主极、五相为5个主极时,结构上会产生不平衡电磁力,除特殊用途外不会使用上述结构。图中,定子的结构为两相为8个主极、三相为6个主极、五相为10个主极,为最简单的结构。
|
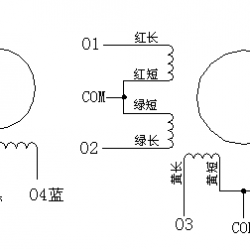 8线步进电机接线方法
8线步进电机接线方法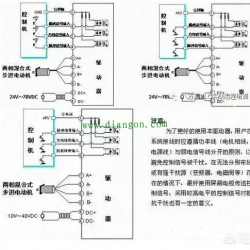 步进电机接线颜色线序定义_步进电机接线图
步进电机接线颜色线序定义_步进电机接线图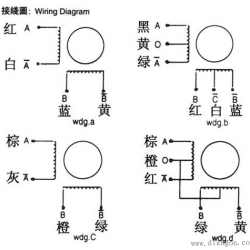 步进电机接线图
步进电机接线图 台达ASD-A2系列伺服驱动器关于AL011报警故
台达ASD-A2系列伺服驱动器关于AL011报警故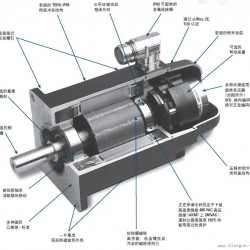 伺服电机的结构图
伺服电机的结构图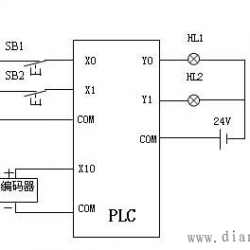 旋转编码器安装接线步骤图解
旋转编码器安装接线步骤图解电工学习网 ( )
GMT+8, 2023-3-27 07:47