|
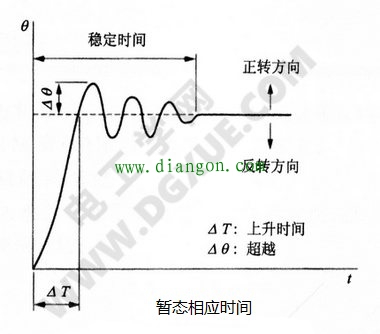
由于步进电机转子惯量作用,即使空载运行一步,也会产生超越角(over-shoot),并在超越角与返回角(under-shoot)之间来回振荡,经过哀减后静止于所定角度,此为步进电机暂态响应特性。 下图表示步进电机的暂态特性,纵轴取转子移动角度,横轴为时间。△T为上升时间,△θ表示超越角,转子自由静止到设定位置的时间(通常到达步距角的士5%误差范围的时间)称为稳定时间(setting time)。
稳定时间越短,快速性越好,为了加快机构的运行速度,使稳定时间变短,步进电机的阻尼(制动)变得很重要。使稳定时间变短的方法有改变摩擦或改变惯量驱动等。 |
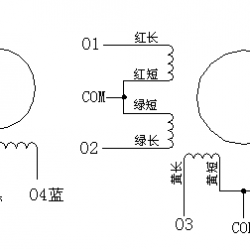 8线步进电机接线方法
8线步进电机接线方法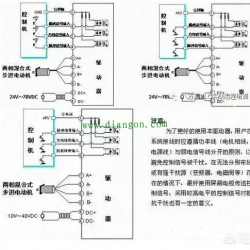 步进电机接线颜色线序定义_步进电机接线图
步进电机接线颜色线序定义_步进电机接线图 步进电机接线图
步进电机接线图 台达ASD-A2系列伺服驱动器关于AL011报警故
台达ASD-A2系列伺服驱动器关于AL011报警故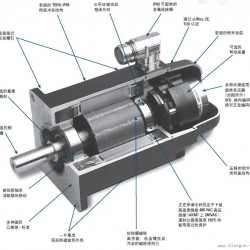 伺服电机的结构图
伺服电机的结构图 旋转编码器安装接线步骤图解
旋转编码器安装接线步骤图解电工学习网 ( )
GMT+8, 2023-5-25 01:39