|

物料取放机构示意图(图标源自网络)
结构
物料取放机械手的机构主要包含:
物料加紧机构:实现对物料的加紧或松开;
升降机构:实现物料的提升或下降;
左右移动机构:实现物料的左右移动;
功能
机械手实现物料从B位移动至A位。其具体流程如下图:

机械手动作流程
通过以上流程分析可以看出,此机械手的动作流程完全符合顺序控制的特点。因此这里可以完全按照顺序控制的程序思路来实现此程序的编写。以下即为以上功能实现的一种示例:
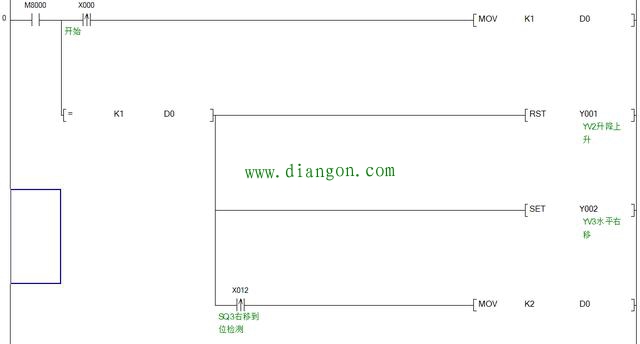
第1步水平右移

第2步升降下降
第3步物料夹取

第4步升降上升

第5步水平左移

第6步升降下降

第7步放物料

第8步升降上升
以上即程序代码,即可实现以上机械手的搬运动作。
| 
 学plc需要什么基础?怎样学习PLC?分享自己学
学plc需要什么基础?怎样学习PLC?分享自己学 用plc控制运料小车编程实例
用plc控制运料小车编程实例 西门子S7-200与变频器之间的MODBUS通讯
西门子S7-200与变频器之间的MODBUS通讯 PLC编程初学者必看 高手勿喷!
PLC编程初学者必看 高手勿喷! 三菱FX3UPLC输入接线
三菱FX3UPLC输入接线 PLC的点动控制原理
PLC的点动控制原理







