2013-7-6 08:01| 编辑:电工学习网| 查看: 33492| 评论: 0
设 备1.永宏plc: FBS-24MCT 1台2.GSK伺服1套: Di20-M10B(驱动器)/80SJT-M032E(电机)3.DC24V开关电源1个4.信号线若干查看驱动器引脚定义并选择控制模式位置控制模式:查看伺服引脚定义,这里用最少的信号线实现电机转动。
SON:为ON时,开启伺服使能。当然伺服使能功能可以通过参数来修改,该信号可由参数PA54设置。PA54=0:只有当外部输入信号SON为ON时,电动机才能被使能;PA54=1:驱动单元内部强制电动机使能,而不需要外部输入信号SON。 CCW/CW:驱动禁止信号,一般和行程开关配合使用,避免超程,该信号可由参数PA20设置。PA20=0:使用驱动禁止功能;PA20=1:不使用驱动进制功能。RDY:驱动单元准备好信号,当电机通电励磁时该信号有输出。位置指令输入信号 这里位置输入信号可以采用差分驱动或者单端驱动接法,由于选用的FBS-24MCT为集电极开路输出形式,所以采用单端驱动接法。伺服驱动单端驱动方式限定外部电源最大电压为25V时,需要串接一个限流电阻R依据:Vcc=24V,R=1.3KΩ~2KΩ;Vcc=12V,R=510KΩ~820KΩ;Vcc=5V,R=0;频率限制为:PLS/DIR:最高脉冲频率 500KHZU/D:最高脉冲频率 500KHZA/B:最高脉冲频率 300KHZ控制线制作GSK随机附带一个44针插座,依据引脚图,把需要的控制信号接线出来。在这里把有可能用到的信号线都接出来,但是这些信号在伺服控制中并不都是必要的,下图中用蓝色线表示伺服的输出信号给PLC的输入,红色表示PLC的输出给伺服的输入,另外开关电源的正、负分别用红、蓝表示。1)选取需要的控制信号
2)伺服同PLC的接线图这里从伺服给PLC的输入信号只取了SRDY,PLC给伺服的信号有SON、FSTP(CCW)、RSTP(CW)、PULS/SIGN这几个信号。
伺服调试·取出驱动器、电机,电机至驱动的编码器连接线和电机至驱动的电源线,出厂都已配置好,这里只要按照指示接好即可。·把PLC至驱动器的控制信号线接好。1.伺服的手动调试1)伺服参数设定GSK伺服上电之后,可以先采用驱动器本身自带的手动功能,该功能模式下,伺服的转动由驱动器按键来控制,进入PA参数菜单,设置一下参数:PA4=3:手动方式,在SR-菜单下操作,用↑、↓键进行加、减速操作。PA20=1:驱动禁止功能无效,此时只是利用驱动器本身来调试,所以把CCW\CW功能先屏蔽。PA54=1:驱动单元内部强制电机使能,而不需要外部输入信号SON。参数设置完成以后,保存后下电。2)手动运行步骤1.驱动器上电,显示 R - 0,是电机运行速度监视窗口。2.检查PA1参数是否和使用的电机代码一致。3.以上2步都无误后,进入“SR- /SR-RED” 菜单下后,按↑、↓键开始运行电机。2.PLC控制运行伺服在手动调试下运行正常,现在进入PLC的上位控制,该控制中PLC的从伺服引入的IO如下:Input:SRDY——X2Output:PULS-: Y0SIGN-: Y1 CCW: Y2 CW: Y3 SON: Y4为了控制方便,这里先把CCW\CW信号使能屏蔽。1) 伺服参数设置PA4=0: 位置方式。PA12:电子齿轮倍频系数(电子齿轮分子),设为2。PA13: 电子齿轮分频系数(电子齿轮分母),设为1。PA14=0:位置方式下,脉冲输入模式:脉冲+方向。PA15=0: 位置指令方向维持原指令方向。PA20=1: 驱动禁止功能无效(即屏蔽CCW/CW使能信号)。PA54=0: 外部SON使能。参数修改完毕后,存储后下电,重新上电。2) 相关计算在这里先做一个伺服电机的多段速运行程序,运动过程1.以速度1000RPM转10圈2.接着以速度1200RPM转20圈3.接着以速度1400RPM转30圈4.接着以速度1600RPM转40圈5.接着以速度1800RPM转50圈6.接着以额定速度2000RPM运行60圈7.停顿一定时间后,从第1步开始重复。由手册知道,伺服每转1圈,编码器反馈10000PS,又电子齿轮设定为2,所以PLC每发出5000PS,伺服就转动1圈即第一段行程10圈对应的脉冲数=10圈×5000PS/圈=50000PS其它段的行程脉冲计数同此式。把伺服需要的速度转化成PLC的脉冲数,以1000RPM为例,假设PLC需要发出的脉冲数为X,电子齿轮设定是2,则有得:X=83333.3HZ由此公式,可求得其它速度所对应的PLC脉冲数。3) PLC参数的设置FBS-24MCT的脉冲输出点共有4轴(8点),为Y0~Y7,默认Y0~Y3为高速200K,Y4~Y7为中速20K。要使得PLC的高速点输出脉冲时,需要先对这几个点的输出进行组态,点击永宏编程软件菜单栏中的“专案\IO组态”进入组态页面
4) 程序的编写
设置完成之后即可进入程序的编写。
5) NC定位表格的编辑用鼠标左键点击 FUN140 指令,然后在英文输入状态下,按键盘上的 Z 键进入NC定位表格的编写,最终结果如下 6)子程序内容INIT子程序主要是做一些初始化,如下SPEED子程序,主要把输入的速度和形成转化成PLC所需要产生的脉冲个数,这里以第1段速度和行程的换算为例,由于这里伺服的额定转速为2000RPM,所以在速度设定的时候,要防止输入转数超过该值。7) 上电运行调试程序编写完成后,让PLC处于RUN状态,在输入页中进行数值监控,如下 总 结由于该示例中PLC的输入信号只从伺服抓取了SRDY,其它点位接线同SRDY的接法一样。PLC输出给伺服的信号只有PLS\DIR和SON,其它信号的接法类似。GSK伺服只需要极少的几根控制线就可以实现伺服的运转,永宏PLC的定位指令全部在NC表格中填写即可。
电工学习网 ( )
GMT+8, 2023-6-3 08:51
Powered by © 2011-2022 www.shop-samurai.com 版权所有 免责声明 不良信息举报
技术驱动未来! 电工学习网—专业电工基础知识、电工技术学习网站。
栏目导航: 工控家园 | 三菱plc | 西门子plc | 欧姆龙plc | plc视频教程

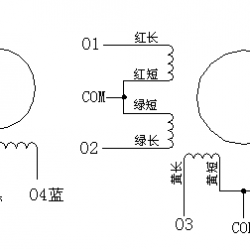 8线步进电机接线方法
8线步进电机接线方法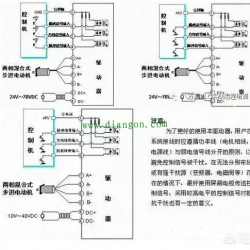 步进电机接线颜色线序定义_步进电机接线图
步进电机接线颜色线序定义_步进电机接线图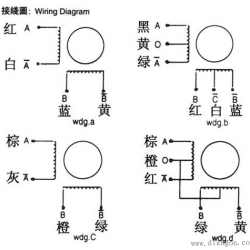 步进电机接线图
步进电机接线图 台达ASD-A2系列伺服驱动器关于AL011报警故
台达ASD-A2系列伺服驱动器关于AL011报警故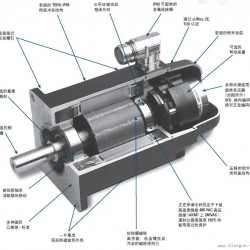 伺服电机的结构图
伺服电机的结构图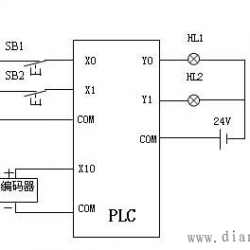 旋转编码器安装接线步骤图解
旋转编码器安装接线步骤图解











