
|
3、驱动电路的选择 因从CPU输出的脉冲信号特别小,固应先经过PWM8713脉冲分配器对脉冲进行分配并经过放大然后再经过光耦驱动来驱动步进进电机。具体的连接图如3-1所示:
PWM8713芯片介绍如下; PMM8713是日本三洋电机公司生产的步进电机脉冲分配器。该器件采用DIP 16封装,适用于二相或四相步进电机。PMM8713在控制二相或四相步进电机时都可选择三种励磁方式(1相励磁,2相励磁,3相励磁三种励磁方式之一),每相最小的拉电流和灌电流为20mA,它不但可满足后级功率放大器的要求,而且在所有输人端上均内嵌有施密特触发电路,抗干扰能力很强,其原理框图如图1所示,表1所列是PMM8713的引脚功能。在PMM8713的内部电路中,时钟选通部分用于设定步进电机的正反转脉冲输入法。PMM8713有两种脉冲输人法:双脉冲输人法和单脉冲输人法。采用双脉冲输人法的连线方式如图3-2(A)所示,其中CPI CA两端分别输人步进电机正反转的控制脉冲。当采用单脉冲输人法时,其连线方式如图2所示;
图3-2 8713脉冲输入
图3-3 PWM8713的引脚图 PMM8713 功能介绍 PMM8713 是专用的步进电机的步进脉冲产生芯片,它适用于三相和四相步进电机。如图1 所示PMM8713 的引脚,Cu 为加脉冲输入端,它使步进电机正转,Cp 为减脉冲输入端,它使步进电机反转,Ck 为脉冲输入端,当脉冲加入此引脚时,Cu 和Cp 应接地,正反转由U/ D 的电平控制,EA 和EB 用来选择励磁方式的,可以选择的方式有一相励磁、二相励磁和一二相励磁,ΦC 用来选择三、四相步进电机,Vss 为芯片工作地,R 为芯片复位端,Φ4~Φ1 为四相步进 脉冲输出端,Φ3~Φ1 为三相步进脉冲输出端,Em 为励磁监视端,Co 为输入脉冲监视端,VDD为芯片的工作电源( + 4~ + 18V).其具体的原理框图如4-3-4所示:
图3-4 驱动电路框图 4、显示电路与键盘的选择 显示电路的用8279芯片来驱动,8279芯片分别接两排显示器,每排为4位显示,分别用来显示步进电机的实际转速与给定转速。 8279与CPU的连接框图如所示:
图 8279与CPU的接线图 8279芯片的具体介绍如下; 1) DB0~DB7:双向数据总线。在CPU于827数据与命令的传送。 2) CLK:8279的系统时钟,100KHZ为最佳选择。 3) RESET:复位输入线,高电平有效。当 RESET 输入端出现高电平时,8279被初始复位。 4) /CS:片选信号。低电平使能,使能时可将命令写入8279或读取8279的数据。 5) A0:用于区分信息的特性。当A0=1时,CPU向8279写入命令或读取8279的状态;当A0为0时,读写一数据。 6) /RD:读取控制线。/RD=0,8279会送数据至外部总线。 7) /WR:写入控制线。/WR=0,8279会从外部总线捕捉数据。 8) IRQ:中断请求输出线,高电平有效。当FIFO RAM 缓冲器中存有键盘上闭合键的键码时,IRQ线升高,向CPU请求中断,当CPU将缓冲器中的输入键数的数据全部读取时,中断请求线下降为低电平。 9) L0~SL3:扫描输出线,用于对键盘显示器扫 描。可以是编码模式(16对1)或译码模式(4对1)。 10) ~RL7:反馈输入线,由内部拉高电阻拉成高电平,也可由键盘上按键拉成低电平。 11) FT、CNTL/STB :控制键输入线,由内部拉高电 阻拉成高电平,也可由外部控制按键拉成低电平。 12) TB0~3、OUTA0~3:显示段数据输出线,可分别作为两个半字节输出,也可作为8位段数据输出口,此时OUTB0为最低位, OUTA3位最高位。 13) 消隐输出线,低电平有效。当显示器切换时或使用消隐命令时,将显示消隐。具体芯片理框图如4-1所示:
图4-1 8279的引脚图 键盘的连接一般有两种方式,一种是独立式键盘;一种是行列式键盘。独立式键盘就是各个键相互独立,每个键盘接一根输入线,通过检测输入线的电平状态来确定那个键按下。这种键盘的输入线较多,结构复杂,一般适用于按键较少操作速度较高的场合。而行列式键盘是由行和列线交义组成,一般用于按键较多的场合。本次设计一共用9个键因此采用行列式键盘。具体的原理图如4-2所示:
图4-2 键盘连接图 显示电路的选择 显示电路选用两排LED显示,每排分别为四位。能满足设计的要求,转速范围为0至1000。LED显示电路有两种接法,一种为共阴极,一种为共阳极。原理图如所示: 、
图 显示器接线图 5、反馈电路的选择 应选用光电编码器作为反馈元件,光电编码器与步进电机是同轴的输出经过放大送到计算机。并通过显示器显示出步进电机的实际转速。关于光电编码器的说明如下; 5.1光电编码器原理 光电编码器,是一种通过光电转换将位移量转换成脉冲或数字量的传感器。这是目前应用最多的传感器,光电编码器是由光栅盘和光电检测装置组成。光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,其原理示意图如图1所示;通过计算 每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。
图4-5-1 光电编码器的原理图 根据检测原理,编码器可分为光学式、磁式、感应式和电容式。根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种。 本次设计用绝对式编码器其原理如下: 绝对编码器是直接输出数字量的传感器,它的圆形码盘上沿径向有若干同心磁道,每条道上由透光和不透光的扇形区相间组成,相邻码道的扇区数目是双倍关系,码盘上的码道数就是它的二进制数码的位数,在码盘的一侧是光源,另一侧对应每一码道有一光敏元件;当码盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。这种编码器的特点是不要计数器,在转轴的任意位置都可读出一个固定的与位置相对应的数字码。显然,码道越多,分辨率就越高,对于一个具有 N位二进制分辨率的编码器,其码盘必须有N条码道。目前国内已有16位的绝对编码器产品。绝对式编码器是利用自然二进制或循环二进制(格雷码)方式进行光电转换的。绝对式编码器与增量式编码器不同之处在于圆盘上透光、不透光的线条图形,绝对编码器可有若干编码,根据读出码盘上的编码,检测绝对位置。编码的设计可采用二进制码、循环码、二进制补码等。它的特点如下: 本次设计用了+5V、+12V电源,采用的是78系列的集成固定三端稳压管。78系列集成稳压器输出稳定,漂移小,精度也比较高。其内部也有完善的保护电路。它有风部过流保护,保证输出电流部会超出最大允许值;它有内部热保护电路,如果输出管的结温达到允许的最大值,它会知道减小输出电流;它内部还有工作区限制电路。使稳压器的工作台不进入不安全区。因此,它的可靠性高。另外,它只有三条引脚,移位输入,移位输出,移位公共端,使用起来很简单。 1.变压 电源变压器将220V的交流电压变为所需的交流电压值。因为在整流、滤波和稳压电路中有一定的压降,所以要使输出电压比所需电压高2V~3V。 2.整流 整流电路将交流电压变为脉冲的直流电压,常用的整流电路有单相半波,全波,桥式和倍压整流电路。这里采用单相桥式不可控整流电路。 3.滤波 滤波电路用于滤去整流输出电压中的波纹,一般由电抗元件组成。如要负载两端并联电容或与负载串联电感L。以及C和L组合而成的各种复式滤波电路。因为电容滤波电路简单,负载直流电压较高,波纹较小,所以我们采用的是电容式滤波。 4.稳压 稳压的作用电当电网电压波动,负载和温度变化时,维持输出直流电压的稳定。本设计采用三端集成稳压器,常用的是7800系列和7900系列。前者是三端固定正输出集成稳压器,后者是三端固定负输出极集成稳压器,整流后的输出波形与纯直流相差甚远,须经滤波才能作直流电源用。最常用的元件是电容。整流输出的电压升高时,输出的电流一面供给负载应用,一面给滤波电容充电。当整流输出电压开始下降时,电容向负载放电以维持输出电压,总的输出电压波形就平滑得多。 下面以电源+12V为例介绍一下电路的工作原理:
图4.6 +12电源电路图 220V,50HZ的交流电压变压后,输出+15V左右的交流电压其频率仍为50HZ,交流信号经桥式整流电路进行全波整流,然后,经电解电容滤波。最后,经CW7805(三端固定稳压器)输出的便是一个平稳的+12V的直流电压信号。电容C4和C5的作用是滤高频波和抑制自激振荡。 7、抗干扰设计由于系统中不可避免会从外界引入干扰,影响系统的控制精度,使系统的稳定性变差,故采用了硬件和软件抗干扰措施。 1.干扰对微机的作用可分为四部分: ①输入系统:它使模拟信号失真,输入数据信号出错。 ②输出系统:使各输出信号混乱,不能反映微机系统的真实输出量。从而导致一系列严重的后果,同时,还把现场的高电压设备与主机隔离,防止出现高频干扰现象。 ③微机控制的内核,使三总线上的数据信号混乱,CPU得到错误的数据信息,使运算操作数失真。 ④电源系统:我们设计所采用的芯片都由直流稳压电源供电。这些直流稳压电源都是由220伏转化而来,有可能产生波动现象。使电源的压降上升或下降,对主机运行产生干扰。 2.本次设计采用的硬件抗干扰措施有: ①在电路排列方面,模拟电路和数字电路之间集中在一起,器件之间尽量缩短距离减小寄生电容。 ②在线路设计中,将所有器件的模拟地线和数字地线都区分开,两者的地线不要混乱,分别与电源地线相连。 ③电源系统的干扰大部分是高次谐波,然后接稳压器件,以保持电源稳定。 ④采用分散独立功能模块供电,在每块系统功能模块上用集成三端固定稳压器如7805、7812、7815、7915等稳压源,而且也减少了公共阻抗的相互耦合,大大提高了供电的可靠性。 3.程序监视系统中的抗干扰(电源部分) WATCHDOG本身能独立工作,基本上不依赖于CPU,当电源受干扰而掉电时,WATCHDOG自动产生中断。使CPU备用电源起作用,对CPU正在执行的数据进行保护。
|
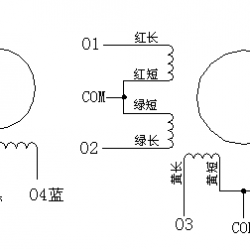 8线步进电机接线方法
8线步进电机接线方法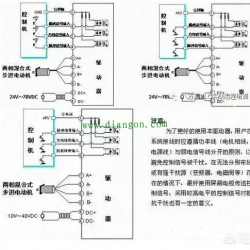 步进电机接线颜色线序定义_步进电机接线图
步进电机接线颜色线序定义_步进电机接线图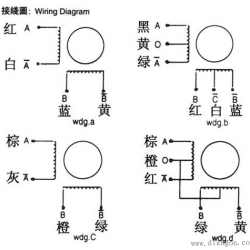 步进电机接线图
步进电机接线图 台达ASD-A2系列伺服驱动器关于AL011报警故
台达ASD-A2系列伺服驱动器关于AL011报警故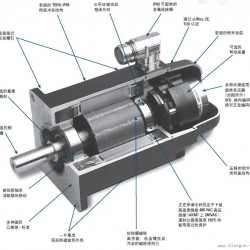 伺服电机的结构图
伺服电机的结构图 旋转编码器安装接线步骤图解
旋转编码器安装接线步骤图解电工学习网 ( )
GMT+8, 2023-5-13 14:28









