|
惯性导航系统的核心是惯性测量单元(IMU)。一个基本的惯性测量单元包括三个单自由度加速度计和三个单自由度陀螺仪或二个2自由度陀螺仪。这些加速度计和陀螺仪的输入轴分别沿空间的三个互相垂直的坐标轴方向。这样,惯性测量单元就可以敏感空间任意方向的线运动或角运动。但是,由于陀螺仪敏感的是相对于惯性空间的运动,而需要测量的是载体相对于某个参照系的相对运动,因此必须进行坐标变换。此外,加速度计所测加速度输出信号中往往包含重力加速度分量和有害加速度分量,必须对重力加速度分量进行修正,对有害加速度分量进行补偿,然后经过积分与计算得到运载体的速度和所在的地理位置。由此可见,惯性测量单元中各个惯性敏感器件敏感的信号需要经过信号变换和信号处理才能转换成可接受的有用信号。 随着微机电系统技术的发展,由微机电系统加速度计和微机电系统陀螺仪组合而成的微惯性测量单元(Micro Inertial Measuremerit Unit,简称MIMU)已研制成功。这种微惯性测量单元具有体积小,重量轻、功耗小、成本低和可靠性高等优点。可广泛应用于汽车安全防护、战术武器制导、个人导航和微小卫星姿态控制等领域。 一个典型的微惯性测量组合系统如图4-20所示,该组合系统包括微惯性敏感器组合装置、变换电路的组合及微数字信号处理系统三部分。 微惯性敏感器组合装置由三只真空封装的硅微型陀螺仪和三只密封的微硅加速度计及前放组合而成。其中,微陀螺仪和微加速度计分别安装在边长3.8 cm的正六面体基座的三个互相正交的平面内。每个惯性敏感器件的输入轴方向需要经过仔细排列,以保证彼此正交。必要时,组合装置中还包含温度敏感装置和预热装置,以实现温控。
图1 MIMU系统框图 变换电路组合具有处理来自敏感装置前放的弱小模拟信号,并能将其转换成数字信号的功能,该电路组合并将信号激励电路、驱动电路和温控电路等集成在一块,形成专用芯片。 微型数字信号处理系统将制导、导航和控制的有关运算程序和信号处理软件集成在专用的数字信号处理芯片上。 1998年,由美国桑地亚国家实验室(Sandia National Lab简称SNL)及柏克利传感器执行器中心(the Berkeley Sensor Actuater Center,简称BSAC)等单位首次用桑地亚模块式,单片微机电系统工艺(The Sandia Modular,Monolithic,Micr0-Elec-tr0-Mechanical Systems Technology,简称M3EMS)将一个敏感χ、Y平面角速率运动的二维微陀螺和一个敏感垂直轴向即Ζ方向角速率的一维微陀螺及三维加速度计以及相应的测试回路完全集成在一块芯片上,芯片边长1cm,如图2所示。构成了一个集成化的微机电(IMEM)IMU原理样机。该IMU可用于gps(全球定位系统)辅助的惯性导航系统。
图2 集成微机电IMUJ泉理样机 |
 一阶和二阶系统的动态特性参数
一阶和二阶系统的动态特性参数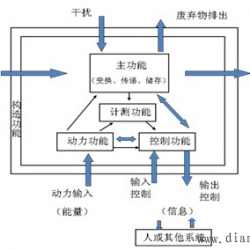 机电一体化系统的功能构成和组成要素
机电一体化系统的功能构成和组成要素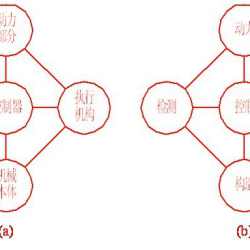 机电一体化系统的基本组成要素
机电一体化系统的基本组成要素 转矩、转动惯量和飞轮转矩的折算
转矩、转动惯量和飞轮转矩的折算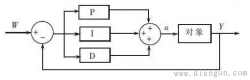 pid控制原理框图
pid控制原理框图 机电传动系统的稳定运行条件
机电传动系统的稳定运行条件电工学习网 ( )
GMT+8, 2023-7-29 13:06