
|
伺服系统是把数控信息转化为机床进给运动的执行机构。数控机床集中了传统的自动机床、精密机床和万能机床三者的优点,将高效率、高精度和高柔性集于一体。而数控机床技术水平的提高首先依赖于进给和主轴驱动特性的改善以及功能的扩大,为此数控机床对进给伺服系统的位置控制、速度控制、伺服电动机、机械传动等方面都有很高的要求。 由于各种数控机床所完成的加工任务不同,它们对进给伺服系统的要求也不尽相同,但通常可概括为以下几方面。 1.数控机床可逆运行。可逆运行要求能灵活地正反向运行。在加工过程中,机床工作台处于随机状态,根据加工轨迹的要求,随时都可能实现正向或反向运动。同时要求在方向变化时,不应有反向间隙和运动的损失。从能量角度看,应该实现能量的可逆转换,即在加工运行时,电动机从电网吸收能量变为机械能:在制动时应把电动机的机械惯性能量变为电能回馈给电网,以实现快速制动。 2.数控机床速度范围宽。为适应不同的加工条件,例如,所加工零件的材料、类型、尺寸、部位以及刀具的种类和冷却方式等的不同,要求数控机床的进给能在很宽的范围内无级变化。这就要求伺服电动机有很宽的调速范围和优异的调速特性。经过机械传动后,电动机转速的变化范围即可转化为进给速度的变化范围。目前最先进的水平,是在进给脉冲当量为1pm的情况下,进给速度在0~240u/min范围内连续可调。 对一般数控机床而言,进给速度范围在o~24m/min时,都可满足加工要求。通常在这样且速度降低,在零速度时,即工作台停止运动时,要求电动机有电磁转矩以维持定位精度,使定由于位置伺服系统是由速度控制单元和位置控制环节两大部分组成的,如果对速度控制系统也过分地追求像位置伺服控制系统那么大的调速范围而又要其可靠稳定地工作,那么速 一般来说,对于进给速度范围为1:20 000的位置控制系统,在总的开环位置增益为20-1时,只要保证速度控制单元具有1:1 000的调速范围就可以满足需要,这样可使速度控制单元线路既简单又可靠。当然,代表当今世界先进水平的实验系统,速度控制单元调速范围己达1:100000。 这就要求伺服系统具有优良的静态与动态负载特性,即伺服系统在不同的负载情况下或切削条件发生变化时,应使进给速度保持恒定。刚性良好的系统,速度受负载力矩变化的影响很小。通常要求承受额定力矩变化时,静态速降应小于5%,动态速降应小于10%。 |
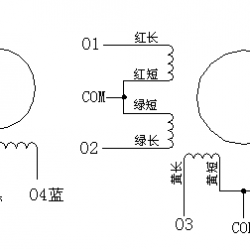 8线步进电机接线方法
8线步进电机接线方法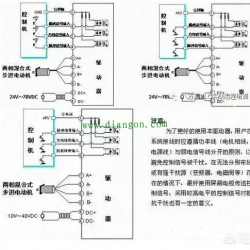 步进电机接线颜色线序定义_步进电机接线图
步进电机接线颜色线序定义_步进电机接线图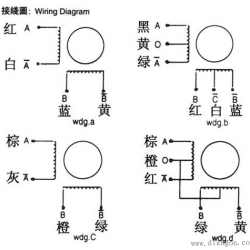 步进电机接线图
步进电机接线图 台达ASD-A2系列伺服驱动器关于AL011报警故
台达ASD-A2系列伺服驱动器关于AL011报警故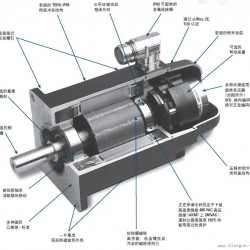 伺服电机的结构图
伺服电机的结构图 旋转编码器安装接线步骤图解
旋转编码器安装接线步骤图解电工学习网 ( )
GMT+8, 2023-3-8 09:26