1微步距控制 uNI_rRODE公司的uc3717芯片适用于小功率步进电机双极性驱动,易于与微机接口,其驱动电路如图1所示。
图中,l(Bout)和15脚(Aout)分别接步进电机一相绕组的两端;2脚(T)接Rc定时元件;3、14脚(V。)为绕组线圈供电电源,可在10 V~45 V范围内选择;4、5、12、13(GND)接地;6脚(Vcc)为Ic供电电源;7、9脚(I0,I1)接逻辑电平,用于选择绕组电流;8脚(Ph)为相位输入端,用于控制转动方向;16脚接绕组电流采样电阻,采样信号通过Rc低通滤波器送至10脚,与内部电压比较器的基准电压进行比较;11脚(Vr)为外接参考电压,改变Vr可实现微步距控制。在整步、半步、1/4步工作方式下,Vr接固定的+5 V。
uc3717对步距的控制是选择I0,I1不同组合,达到步距控制的目的。下表列出了I0,I1的真值表对绕组电流的控制关系。
以A、B表示二相绕组正向电流,以A、B表示二相绕组反向电流,则半步距工作方式采用二相和单相交替激励的二相八拍方式,即AB—B—AB→A→AB_→B_→AB_→A。以两相通电表示整步状态,单相通电表示半步状态,1/4步距工作方式是在整步与半步间插入一个l/4步状态。
2位置信号
脉冲检测将增量式光电码盘固定在电机轴后端,位置检测单元累计与电机同轴码盘发出的脉冲数,计算机读取可逆计数器数据,得到实际运行距离,其结构框图如图2所示。
由于增量码盘没有初始零位置,要累计每一程序段的脉冲个数,计算机需在每个程序段开始处向可逆计数器进行归零操作,即给计数器清零,以确定增量码盘轴的起始位置。码盘旋转时输出相位相差90。的两路脉冲A、B随着码盘转向的变化,相互间超前滞后关系会发生变化,这样就可以利用某一路脉冲去选通另一路脉冲的前后沿,从而分出正转和反转计数脉冲,其脉冲整形、方向判别电路如图3所示。
3三轴联动
定位系统三轴联动定位系统框图如图4所示。通过计算机I/O口输出位置信息,送入控制电路,控制电机旋转。步进电机由联轴器与滚珠丝杠相连,带动三维工作台上下、左右、前后移动,激光器出光头在计算机控制下定点出光,在工件上雕刻出所期望的轨迹。
图中,x、y、z轴定位开关信号检测是三组机械开关,经电路接口板上的门电路处理,变换成逻辑电平,由cPu查询开关状态,可确定三轴参考系坐标原点。
三维坐标定位的精度同时取决于检测装置获取信息的准确程度。因此,进一步通过信息补偿有效提高检测装置的精度并使其不受外部环境的影响,将为进一步提高运动精度提供一条新的途径。为此采取以下措施:对检测装置的误差及其与系统状态的关系进行精确测定并建立描述误差关系的数学模型。加工过程中由数控系统根据有关状态信息(如工作台实际位置、检测装置的温度等)按数学模型计算误差补偿值,并据此对检测装置的测量值进行实时校正,从而保证机床运动部件沿各自的坐标轴具有很高的定位精度。
4结语
激光内雕机是定点出光加工设备,x、y、z轴起停频繁,定位要求快速准确。采用高分辨率的二相混合式步进电机,配以微步距控制和光电编码器检测技术,能够满足系统快、稳、准的定位要求。整个系统运行平稳、结构简单、软硬件资源搭配合理、维护方便。
| 
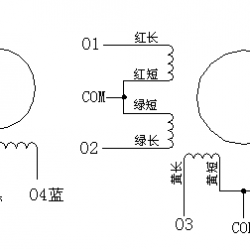 8线步进电机接线方法
8线步进电机接线方法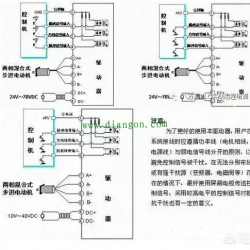 步进电机接线颜色线序定义_步进电机接线图
步进电机接线颜色线序定义_步进电机接线图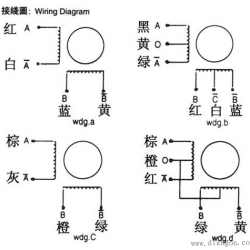 步进电机接线图
步进电机接线图 台达ASD-A2系列伺服驱动器关于AL011报警故
台达ASD-A2系列伺服驱动器关于AL011报警故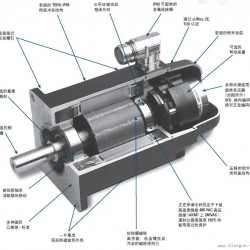 伺服电机的结构图
伺服电机的结构图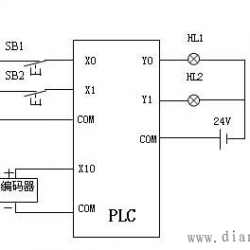 旋转编码器安装接线步骤图解
旋转编码器安装接线步骤图解



