符号: 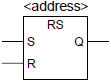
| 参数 |
数据类型 |
内存区域 |
说明 |
| <address> |
BOOL |
I、Q、M、L、D |
置位或复位 |
| S |
BOOL |
I、Q、M、L、D |
启用复位指令 |
| R |
BOOL |
I、Q、M、L、D |
启用复位指令 |
| Q |
BOOL |
I、Q、M、L、D |
<地址>的信号状态 |
说明:如果R输入端的信号状态为“1”,S输入端的信号状态为“0”,则复位RS(置位优先型RS双稳态触发器)。否则,如果R输入端的信号状态为“0”,S输入端的信号状态为“1”,
则置位触发器。如果两个输入端的RLO均为“1”,则指令的执行顺序是最重要的。
RS触发器先在指定<地址>执行复位指令,然后执行置位指令,以使该地址在执行余下的程序扫描过程中保持置位状态。
只有在RLO为“1”时,才会执行S(置位)和R(复位)指令。这些指令不受RLO“0”的影响,指令中指定的地址保持不变。
MCR (主控继电器)依存关系
只有将RS触发器置于激活的MCR区内时,才会激活MCR依存关系。在激活的MCR区内,如果MCR处于接通状态,则按以上所述将寻址位复位为“0”或置位为“1”。如果MCR处于关闭状态,则无论输入状态如何,指定地址的当前状态均保持不变。
状态字:
| |
BR |
CC 1 |
CC 0 |
OV |
OS |
OR |
STA |
RLO |
/FC |
| 写: |
- |
- |
- |
- |
- |
X |
X |
X |
1 |
实例:
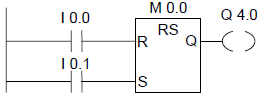
如果输入端I0.0的信号状态为“1”,I0.1的信号状态为“0”,则置位存储器位M0.0,输出Q4.0将是“0”。否则,如果输入端I0.0的信号状态为“0”,I0.1的信号状态为“1”,则复位存储器位M0.0,输出Q4.0将是“1”。如果两个信号状态均为“0”,则不会发生任何变化。如果两个信号状态均为“1”,将因顺序关系执行置位指令;置位M0.0,Q4.0将是“1”。
如果实例在激活的MCR区之内:
MCR处于打开状态时,将按以上所述复位或置位Q4.0;MCR处于关闭状态时,无论输入状态如何,Q4.0均保持不变。 | 
 PLC输入端和输出端怎么接线
PLC输入端和输出端怎么接线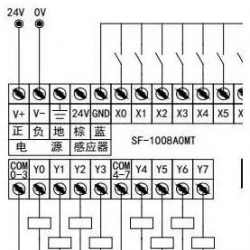 什么是COM端口?PLC中COM端口如何接线?
什么是COM端口?PLC中COM端口如何接线?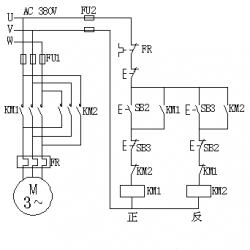 plc控制电动机正反转梯形图
plc控制电动机正反转梯形图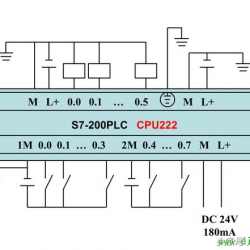 西门子S7-200系列PLC全套接线图
西门子S7-200系列PLC全套接线图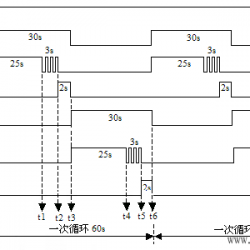 PLC十字路口的交通灯控制编程实例
PLC十字路口的交通灯控制编程实例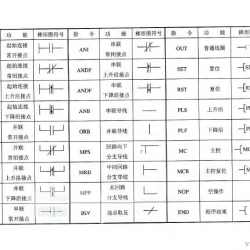 plc基础知识指令27个
plc基础知识指令27个