设触发器的初始状态为Q=0、Q=1,输入信号波形如图1所示,当SD的下降沿到达后,经过G1的传输延迟时间tpd,Q端变为高电平。这个高电平加到门G2的输入端,再经过门G2的传输延迟时间tpd,使Q变为低电平。当Q的低电平反馈到G1的输入端以后,即使SD=0的信号消失(即SD回到高电平),触发器被置成Q=1状态也将保持下去。可见,为保证触发器可靠地翻转,必须等到Q=0的状态反馈到G1的输入端以后,SD=0的信号才可以取消。因此,SD输入的低电平信号宽度tw应满足tw≥2tpd。同理,如果从RD端输入置0信号,其宽度也必须大于、等于2tpd 。
2.传输延迟时间: 从输入信号到达起,到触发器输出端新状态稳定地建立起来为止,所经过的这段时间称为触发器的传输延迟时间。从上面的分析已经可以看出,输出端从低电平变为高电平的传输延迟时间tPLH和从高电平变为低电平的传输延迟时间tPHL是不相等的,它们分别为: tPLH=tpd,tPHL=2tpd 若基本RS触发器由或非门组成,则其传输延迟时间将为 tPHL=tpd,tPLH=2tpd 。 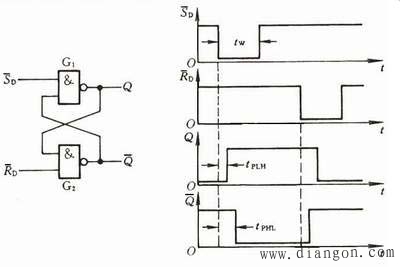 图1 基本RS触发器的电路和动态波形
|
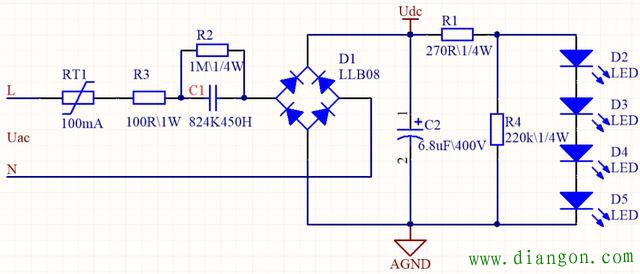 阻容降压电路结构原理图解
阻容降压电路结构原理图解 电子电路的核心是什么?主要传输什么信号?
电子电路的核心是什么?主要传输什么信号? 电工必知整流桥好坏的两种检测方法
电工必知整流桥好坏的两种检测方法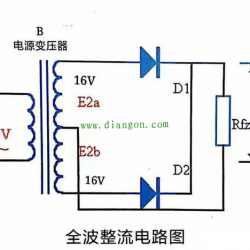 4个二极管整流和2个二极管整流出电压一样吗
4个二极管整流和2个二极管整流出电压一样吗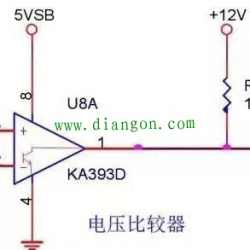 三分钟带你搞懂运算放大器与比较器的区别
三分钟带你搞懂运算放大器与比较器的区别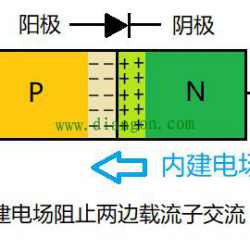 PN结为什么可以单向导电?PN结单向导电原理
PN结为什么可以单向导电?PN结单向导电原理电工学习网 ( )
GMT+8, 2023-3-16 05:03