
|
ЫХЗўЕФПижЦЪѕгягаКмЖрЃКБеЛЗПижЦЁЂАыБеЛЗПижЦЁЂПЊЛЗПижЦЃЌЫйЖШЛЗЁЂЕчСїЛЗЁЂЮЛжУЛЗЃЌКмЖрХѓгбЯраХУЛгаХЊЧхГўЃЌНёЬьОЭЮЊДѓМвЯъЯИНтД№вЛЯТЃЌЫХЗўЕФПижЦФЃЪНЪЧдѕбљЕФЃПИУдѕбљЯЕЭГЕФеЦЮеетвЛПщЃП ПижЦЯЕЭГЕФПижЦРраЭ ПЊЛЗПижЦЃКУЛгаМьВтзАжУЃЌЛђепВЛЗДРЁЛњДВЕФЮЛвЦСПЕНПижЦЦїЁЃОЭЮЛжУПижЦЖјбдЃЌжИСюаХКХаЮЪНЖрЮЊpulse АыБеЛЗПижЦЃКМьВтзАжУАВзАЫХЗўЕчЛњЩЯЃЌМфНгЗДРЁЛњДВЕФЮЛвЦСПЕНПижЦЦїЃЌВЛПМТЧЛњаЕЮѓВюЁЃ ШЋБеЛЗПижЦЃКМьВтзАжУАВзАЛњДВБОЬхЩЯЃЌжБНгЗДРЁЛњДВЕФЮЛвЦСПЕНПижЦЦїЁЃКѓЖўепЃЌОЭЮЛжУПижЦЖјбджИСюаХКХаЮЪНЖрЮЊФЃФтСПЕчбЙЁЃ
ПижЦФЃЪНжжРр
ЫХЗўЗХДѓЦїШ§жжПижЦЗНЪН 1зЊОиПижЦЃКЭЈЙ§ЭтВПФЃФтСПЕФЪфШыЛђжБНгЕФЕижЗЕФИГжЕРДЩшЖЈЕчЛњжсЖдЭтЕФЪфГізЊОиЕФДѓаЁЃЌжївЊгІгУгкашвЊбЯИёПижЦзЊОиЕФГЁКЯЁЃЁЊЁЊЕчСїЛЗПижЦ 2ЫйЖШПижЦЃКЭЈЙ§ФЃФтСПЕФЪфШыЛђТіГхЕФЦЕТЪЖдзЊЖЏЫйЖШЕФПижЦЁЃЁЊЁЊЫйЖШЛЗПижЦ 3ЮЛжУПижЦЃКЫХЗўжазюГЃгУЕФПижЦЃЌЮЛжУПижЦФЃЪНвЛАуЪЧЭЈЙ§ЭтВПЪфШыЕФТіГхЕФЦЕТЪРДШЗЖЈзЊЖЏЫйЖШЕФДѓаЁЃЌЭЈЙ§ТіГхЕФИіЪ§РДШЗЖЈзЊЖЏЕФНЧЖШЃЌЫљвдвЛАугІгУгкЖЈЮЛзАжУЁЃ ПижЦРэТлИХФю
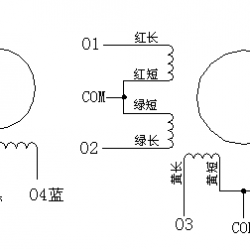
ЮЛжУПижЦФЃЪН ЮЛжУПижЦЕФЧјЗжЃК 1ЃЎАыБеЛиТЗПижЦЂёЁИТэДяжсЖЫМьГіЁЙ 2ЃЎАыБеЛиТЗПижЦЂђЁИМѕЫйЛњЖЫМьГіЁЙ 3ЃЎШЋБеЛиТЗПижЦЁИЛњаЕЮЛжУМьГіЁЙ ЪЙгУACЫХЗўТэДягУгкЮЛжУПижЦЃЌвЛАуЪЧжИгЩгыЫХЗўТэДяжсаФвЛЬхЛЏЕФЮЛжУМьГіЦї ЃЈБрТыЦїЁЂНЧЖШМьВтЦїЕШЃЉ ШЁЕУЛиЪкбЖКХЃЌЕБгыЮЛжУжИСюСПвЛжТЪБЃЌЪЙТэДяжсЭЃжЙжЎПижЦЃЌВЂжДааЫХЗўЫјЖЈжЎЛњФмЃЈSERVO LOCKЃЉЁЃ ЪЪгУгкЮЛжУПижЦ AC ЫХЗўТэДягУгкЮЛжУПижЦЃЌвдгУЭОЗжБ№ПЩЧјЗжЮЊ2ДѓЯю
ЮЛжУЛЗЕФзїгУ ЁяЖЈЮЛжИСюЭЈГЃвдТіГхСааЮЪНЪфШыЃЌТіГхзмЪ§ЮЊЖЈЮЛСПЃЌЖЈЮЛЫйЖШЪЧЕЅЮЛЪБМфЃЈУыЃЉЕФТіГхСПЁЃЃЈЃаЃаЃгЃКЃаЃѕЃьЃѓЃхЃЏЃгЃхЃуЃяЃюЃфЃЉ ЁяЪфШыЕФТіГхСПгыЗДРЁЕФТіГхЪ§СПЯрвЛжТЪБЃЌетВХЪЕЯжЖЈЮЛЭъСЫЁЃ ЁядкЮЛжУПижЦВПжаЃЌвђЮЊгаЪфШыТіГхЕФМгЫуЁЂЗДРЁТіГхЕФМѕЫуЃЌЫљвдгавЛИіМЦЪ§ЦїЁЃЃЈвВГЦЦЋВюМЦЪ§ЦїЃЉ ЮЛжУПижЦЪБЃКЙЄПиЛњМАЩЯЮЛПижЦЦїЗЂГіЮЛжУжИСюаХКХЃЌТіГхЃЋЗНЯђЃЌЫЭШыТіГхСаЃЌОЫХЗўЕчзгГнТжЗжЦЕКѓЃЌдкЦЋВюПЩФцМЦЪ§ЦїжагыЗДРЁТіГхаХКХБШНЯКѓаЮГЩЦЋВюаХКХЃЌЗДРЁТіГхЪЧгЩЙтЕчБрТыЦїМьВтЕНЕчЛњЪЕМЪЫљВњЩњЕФТіГхЪ§ЁЃОЫФБЖЦЕКѓЕФЃЌЮЛжУЦЋВюаХКХОЮЛжУЛЗЕФИДКЯЧАРЁПижЦЦїЕїНкКѓЃЌаЮГЩЫйЖШжИСюаХКХЃЌЫйЖШжИСюаХКХгыЫйЖШЗДРЁаХКХБШНЯКѓЕФЦЋВюаХКХОЫйЖШЛЗБШР§Л§ЗжПижЦЦїЕїНкКѓВњЩњЕчСїжИСюаХКХЃЌдкЕчСїЛЗжаОЪИСПБфКѓЃЌгЩSPWMЪфГізЊОиЕчСїЃЌПижЦНЛСїЫХЗўЕФдЫааЃЌЮЛжУПижЦОЋЖШгЩЙтЕчБрТыЦїУПзЊВњЩњЕФТіГхЪ§ПижЦЃЌгаОјЖдгыдіСПСНжжЃЌдіСПЕФвзгкеЦЮеЃЌЦНОљЪйУќГЄЃЌЗжБцТЪИпЃЌЕЋЖЯЕчКѓЮоБЃГжЁЃ ЫйЖШПижЦФЃЪН
|
 8ЯпВННјЕчЛњНгЯпЗНЗЈ
8ЯпВННјЕчЛњНгЯпЗНЗЈ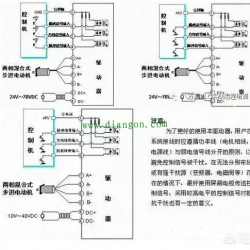 ВННјЕчЛњНгЯпбеЩЋЯпађЖЈвх_ВННјЕчЛњНгЯпЭМ
ВННјЕчЛњНгЯпбеЩЋЯпађЖЈвх_ВННјЕчЛњНгЯпЭМ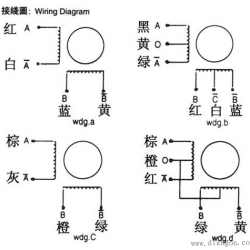 ВННјЕчЛњНгЯпЭМ
ВННјЕчЛњНгЯпЭМ ЬЈДяASD-A2ЯЕСаЫХЗўЧ§ЖЏЦїЙигкAL011БЈОЏЙЪ
ЬЈДяASD-A2ЯЕСаЫХЗўЧ§ЖЏЦїЙигкAL011БЈОЏЙЪ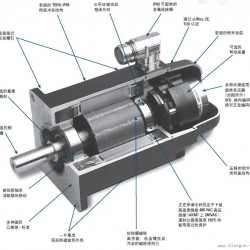 ЫХЗўЕчЛњЕФНсЙЙЭМ
ЫХЗўЕчЛњЕФНсЙЙЭМ а§зЊБрТыЦїАВзАНгЯпВНжшЭМНт
а§зЊБрТыЦїАВзАНгЯпВНжшЭМНтЕчЙЄбЇЯАЭј ( )
GMT+8, 2023-4-3 05:45
Powered by © 2011-2022 www.shop-samurai.com АцШЈЫљга Утд№ЩљУї ВЛСМаХЯЂОйБЈ
ММЪѕЧ§ЖЏЮДРД! ЕчЙЄбЇЯАЭјЁЊзЈвЕЕчЙЄЛљДЁжЊЪЖЁЂЕчЙЄММЪѕбЇЯАЭјеОЁЃ
РИФПЕМКНЃК ЙЄПиМвдА | Ш§Стplc | ЮїУХзгplc | ХЗФЗСњplc | plcЪгЦЕНЬГЬ




