
|
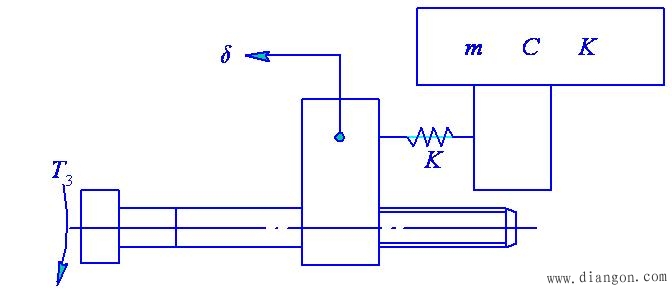
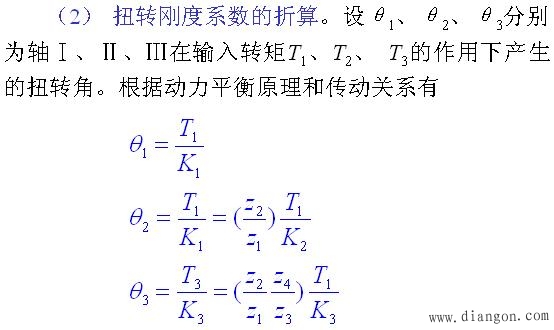
��ͼ2-11��ʾ�����ػ�����������ϵͳ��, ��J1Ϊ������綯��ת�ӹ��ɵ�ת��������J2��J3Ϊ������ɵ�ת�������� K1��K2��K3�ֱ�Ϊ����Ťת�ն�ϵ���� KΪ˿����ĸ������ĸ�������ֵ�����ն�ϵ���� mΪ����̨������ CΪ����̨����ճ������ϵ���� T1��T2��T3�ֱ�Ϊ��������ת�ء� 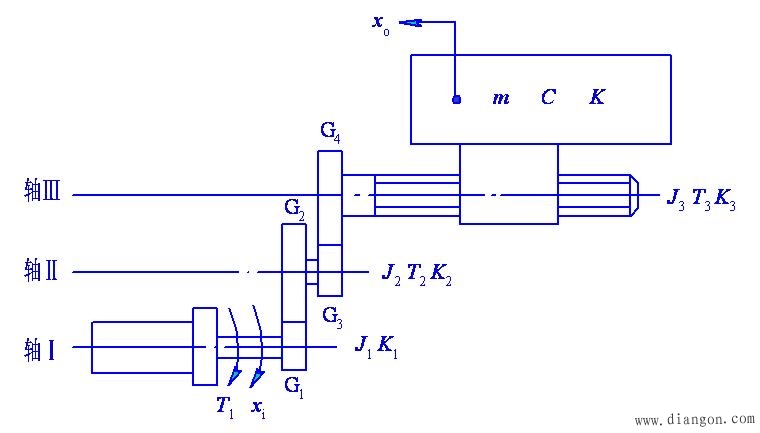
ͼ2-11 ���ػ�������ϵͳ
1. ת�����������㪥
������ϵ�ת����������̨�����������㵽�����,��Ϊϵͳ�ĵ�Чת����������T��1�� T��2�� T��3�ֱ�Ϊ���ĸ���ת��, ��1����2����3�ֱ�Ϊ���Ľ��ٶ�,vΪ����̨λ��ʱ�����ٶ�,z1, z2, z3, z4�ֱ�Ϊ�ĸ����ֵij�����
��1�� ����ת�����������㡣 ���ݶ���ƽ��ԭ��,�������ƽ�ⷽ�̷ֱ��� 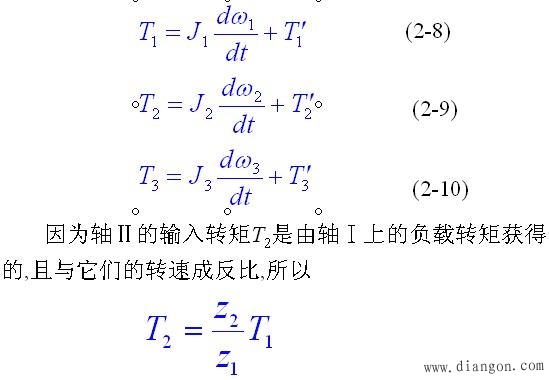 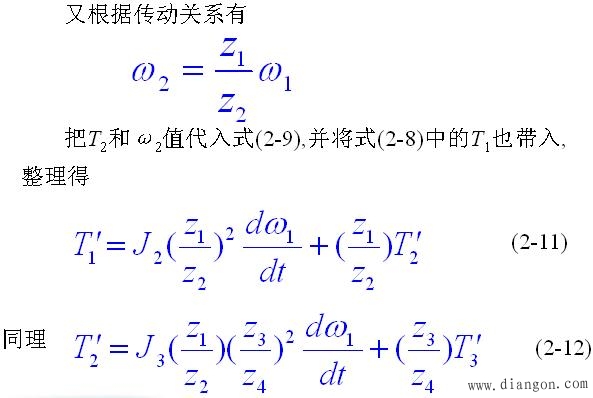 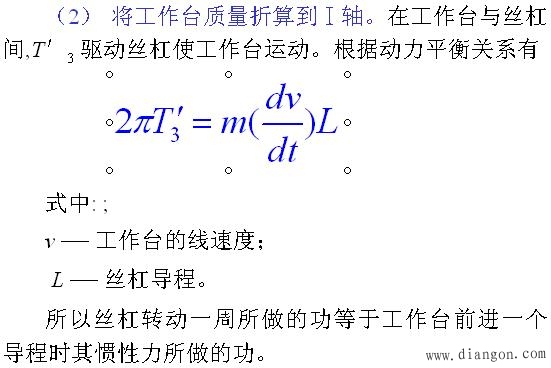  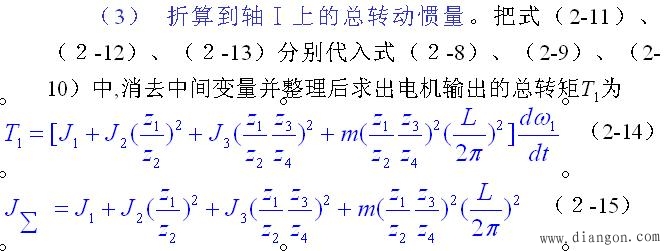
2. ճ������ϵ�������㪥
������̨����ת��ʱ,��������ת��T3��ȫ�����˷�ճ�������������ġ����ǵ����������ڵ�Ħ����ʧ�ȹ���̨�����Ħ����ʧС�ö�,��ֻ�ƹ���̨�����ճ������ϵ��C��
���ݹ���̨��˿��֮��Ķ���ƽ���ϵ�Ъ���
T32��=CvL

3. ���Ա���ϵ��������
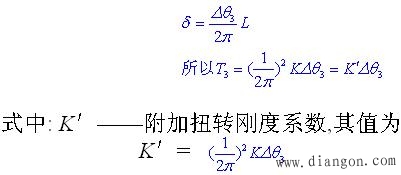
��1�� ����նȵ����㡣 ��ϵͳ�е����غ�,˿����ĸ������ĸ��������������Ա���,ͼ2-12�����ĵ�Ч����ͼ����˿���������ת��T3��������,˿�ܺ���̨֮��ĵ��Ա���Ϊ��,��Ӧ��˿�ܸ���Ťת��Ϊ����3�����ݶ���ƽ��ԭ���ʹ�����ϵ,��˿��������У� ����
2��T3=K��L
ͼ2-12 ���Ա��εĵ�Чͼ
       |
 һ�Ͷ���ϵͳ�Ķ�̬���Բ���
һ�Ͷ���ϵͳ�Ķ�̬���Բ��� ����һ�廯ϵͳ�Ĺ��ܹ��ɺ����Ҫ��
����һ�廯ϵͳ�Ĺ��ܹ��ɺ����Ҫ�� ����һ�廯ϵͳ�Ļ������Ҫ��
����һ�廯ϵͳ�Ļ������Ҫ�� ת�ء�ת�������ͷ���ת�ص�����
ת�ء�ת�������ͷ���ת�ص�����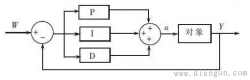 pid����ԭ����ͼ
pid����ԭ����ͼ ���紫��ϵͳ���ȶ���������
���紫��ϵͳ���ȶ����������繤ѧϰ�� ( )
GMT+8, 2023-4-19 08:28