
|
步进电机系统的控制信号功率很低,如用TTL数字集成电路提供的5V/18mA信号进行控制。而产生1.2N.m转矩的磁阻式步进电机,通常需要5V/3A的额定值对绕组励磁。因此,控制电路连接到步进电机前必须经过几级开关放大。许多制造厂已在提供与步进电机相匹配的驱动电路。不过,步进电机用户在这个领域内仍有相当大的改革余地。本节就步进电机对驱动电路的基本要求,介绍其基本驱动电路和一些常用的、比较完善的驱动电路。 由步进电机的动态特性可知,若步进电机以高速工作,则电气时间常数的影响显著增大:导通期间,电流不能迅速上升到额定值;截止期间,绕组电流不能立即消失。因而,步进电机产生的转矩明显下降。除此之外,励磁绕组两端在截止时刻还会产生很高的反电势,若不采取措施,则有可能损坏开关元件。 针对这些问题,通常对驱动电路有如下要求:(1)能够改善电流波形的上升沿和下降沿,即产生接近矩形的电流波形。考虑电路简单,成本低等因素。小功率步进电机可通过串联限流电阻减少时间常数,拓宽工作频率范围。不过,为了维持电机静止时的相电流额定值,电源电压必须增加。因此,需要的直流电源容量比较大。电机静止时,电源输出的主要部分消耗在串联的限流电阻上。这时,限流电阻上产生的热量必须迅速散发,否则,可能出现问题。由此可见,简单的 串联限流电阻是改善速度范围的—种低效的方法。对大功率或较大功率的步进电机而言,常使用高低压或斩波等方式驱动。这些驱动方式虽然电路较复杂,但驱动特性好,且有较高的效率。(2)设置供截止期间释放电流流通的回路,降低绕组两端产生的反电势,加快电流衰减。(3)要求驱动电路的功耗低、效率高。 为了提高步进电机定位的分辨率,减少过冲和抑制振荡,有时要求驱动电路具有细分功能,将常规的矩形波供电改变成阶梯波供电。 1. 单极性驱动电路 图1是用于三相磁阻式步进电机的一种简单的单极性驱动电路。每相绕组由独立的驱动电路励磁,驱动电路出小功率“相控制信号”控制。这个控制信号经过
放大加到开关管的 基极,控制相绕组的导通或截止。若注入开关管基极的电流足够大,则开关管饱和导通(压降为0.1V左右),相绕组受到励磁。直流电压几乎全部加在相绕组和与它串联的限流电阻上。 VS=I(r+R) (1) 式中 r为相绕组电阻;R为限流电阻;VS 为产生额定绕组电流I的直流电源电压。 通常,相绕组的电感很大,因此,它的电气时间常数(电感/电阻)大。相电流上升到额定位的建立过程显得太慢。为了在高速情况下获得令人满意的电机动作,通过增加限流电阻,并同时成比例地增加电源电压,能够减少相电路的电气时间常数,因而电机能在很大的速度范围内工作。 相绕组电感的另—种影响是相电流不能立即切断。如果突然去掉开关晶体管的基极驱动电流,晶体管的集电极和发射极之间将出现一个很大的感应电压,这个电压可能使驱动电路损坏。为了避免这种危险,常为相电流提供另一条电流通路-释放电路。切断开关晶体管时,相电流能够沿着由释放二极管和释放电阻Rf提供的通路衰减。如果相电流已达到它的额定值I,则断开晶体管开关后,开关晶体管两瑞立刻出现最大电压(Voemax)。忽略释放二极管两端的正向压降,得: Voemax=VS+RfI (2) 相电流在释放电路里衰减,断开时贮存在相电感里的磁能消耗在释放回路电阻上(绕组电阻+限流电阻+释放电阻)。 设计举例:一台三相磁阻式步进电机,总的相绕组电阻为lΩ,平均相电感为40mH;额定相电流为2A。试设计一个简单的单极性驱动电路,该电路在相导通时它的电气时间常数为2ms,截止时时间常数为l ms。 由电气时间常数=电感/电阻,考虑2ms的导通时间常数,总的相电阻=40/2=20Ω。因为绕组电阻为总的相电阻提供了1Ω,所以,限流电阻=19Ω。 这个电阻在该相连续受额定电流(2A)激励时,必须能够散发所产生的能耗。因此, 额定功率=电流)2×(电阻)=22×19=76W。 直流电源电压可以利用式(4.1)确定,电源电压=额定电流这个释放电阻的功率取决于电机的工作速度。截止时刻贮存在 相电感里的能量为: 贮存的能量=电感×(电流)2/2=40×4/2mW=0.08W。 贮存的这些能量消耗在相电阻和释放电阻上。在这个例子里,相电阻和释放电阻相等,因此,每当对应的相截止时,贮藏的能量一半消耗在释放电阻上。例如,在每秒600步的情况下,三相中的每一相每秒钟截止200次。消耗在释放电阻上的平均功率为200×0.04W=8W。高速下的功耗分析比较复杂,因为截止时的相电流本身是工作速度的函数。假定相电流已经达到了它的额定值,以此为依据,可得到释放电阻在“最坏情况”下的功耗估计值。 最后,讨论两个半导体器件。当晶体管导通时,释放二极管必须经受得住等于直流电源电压的反向电压;当晶体管刚刚截止时,它必须能通过等于额定相电流的峰值正向电流。开关晶体管必须能承受由式(2)确定的集电极-发射极电压:Voemax=VS+RfI=40×(20×2)=80V。 这只晶体管必须能通过相电流(2A);在饱和的情况下必须有尽可能高的电流增益。 2.(高低)双电压驱动电路 高低压驱动电路里有两种电源电压。接通或截止相电流时使用高电压;继续励磁期间使用低电压,把电流维持在额定值上。 图2是单极性高低压驱动电路中的一相电路。开始激励绕时,两只晶体管Tl和T2导通,因此,加在相绕组上的电压等于两个电源电压之和(VL+VH),二极管D2受VH反偏。因没有串联电阻限制电流,因此,它开始迅速上升。经过很短时间,晶体管T2截止,绕组电流沿电源电压VL、二极管D2和晶体管Tl流动。 绕组额定电流由电压VL维持,经过选择可使VL/R=额定电流。相激励结时,晶体管Tl也截止。绕组电流沿着经过二极管Dl和D2的通路流动。因为释放通路里包含很高的电源电压VH,所以电流迅速衰减。 低压驱动电路比较简单,只要求控制电路正确控制每次励磁开始阶段晶体管T2的导通和关断时刻。因为这个晶体管的导通时间由绕组时间常数决定,为一固定值,所以,可用相励磁信号触发一个固定周期的单稳电路来实现。 前面在分析驱动电路性能时未考虑由转子运动感应的电压。一旦绕组电流建立了,只有低压电源有效;这个电压也许不足以克服其余励磁时间间隔里内感应产生的电压。这是高低压驱动电路存在的一个缺点。 3.斩波驱动电路 以单极性形式描述的斩波驱动电路如图2所示,它的电源电压比较高,每当电流降到额定
值之下时,电源电压就加到相绕组上。 如果存在相励磁信号(励磁期间,晶体管T1导通),晶体管T2的基极驱动则受绕组电流在小电阻RC上的压降VC控制。因为相电流开始时为零,VC等于零,此时令晶体管T2导通。全部电源电压加在相绕组上,如图3定时图所示。在电源电压的作用下,相电流迅速上升,直到稍微超过额定值I。此时,控制电压为 R0I+e,足以截止晶体管T2。T2截止后,外电压不再加在相绕组上,电流沿包含T1、 R0和二极管D1的通路衰减。这个电流通路的电阻很小,没有反向电压,因此,电流衰减比较慢。因为电阻R0仍包括在电路里,所以能够监视绕组电流;当控制电压降到R0I-e时,晶
体管T2再次导通。全部电源电压又 加在绕组上,电流迅速上生到稍大于额定值。在整个激磁时间里重复这种循环,通过“通-断”闭环控制使绕组电流维持在它的额定值附近。 激磁结束后,两只晶体管都截止,绕组电流经过二极管Dl和D2释放。电流回路包含反向的电源电压,它强迫电流迅速降到零。截止时刻贮存在绕组电感里的大部分能量返回到电源,因此,系统效率很高。 斩被驱动的控制电路比较复杂,例如,T2的基极驱动需要有一个控制电压为VC的史密特触发电路,以此产生跃迁电平。如果这些电平没有被很好隔开,则晶体管T2以很高频率导通和截止,对邻近设备引起干扰和在电机里产生附加铁损。(//www.shop-samurai.com/版权所有)然而,斩波驱动毕竞有很多优点:充分利用了现有的电源电压,能够在可能的最宽速度范围内工作,消除了限流电阻上的功耗,系统效率非常高等。 4.调频调压驱动
图4斩波驱动电流波形和晶体管开关时间 图5 细分驱动电路的原理电路
图6 一相驱动电路的电路图
对于16细分或更多细分的数字代码也可以类似方式列出。EPBOM输出的数字代码经图6中的DAC转换成相应的电流值,再通过运放A1转换成给定电压加到运放A2的“+”端。EPROM输出的代码越大,加到A2的给定电压越大,流过电机绕组的电机为给定电压/R也越大。最大代码0FFH产生额定电流;小于额定电流的驱动电流分别由00H、3FH、7FH和0BFH产生。
图6三相六拍4细分电流波形
图7 细分驱动和调频调压驱动电路框图 |
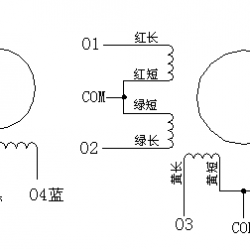 8线步进电机接线方法
8线步进电机接线方法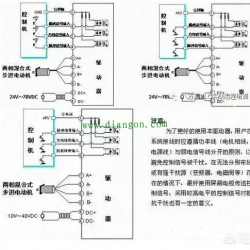 步进电机接线颜色线序定义_步进电机接线图
步进电机接线颜色线序定义_步进电机接线图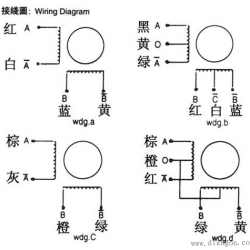 步进电机接线图
步进电机接线图 台达ASD-A2系列伺服驱动器关于AL011报警故
台达ASD-A2系列伺服驱动器关于AL011报警故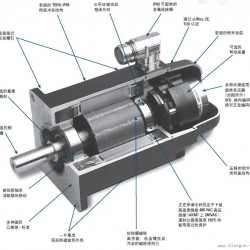 伺服电机的结构图
伺服电机的结构图 旋转编码器安装接线步骤图解
旋转编码器安装接线步骤图解电工学习网 ( )
GMT+8, 2023-4-9 20:20








