
|
实际上经过磁化后的转子及定子的小齿的位置关系,在此说明如下。 首先解释励磁,励磁就是指电动机线圈通电时的状态。
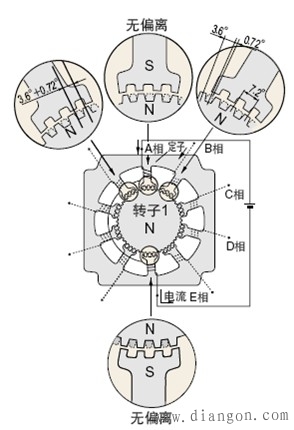
● A相励磁
将 A 相励磁,会使得磁极磁化成 S 极,而其将与带有 N极磁性的 转子 1 的小齿互相吸引,并与带有S极磁性的转子 2 的小齿相斥, 于平衡后停止。此时,没有励磁的 B相磁极的小齿和带有 S极磁性 的转子 2 的小齿互相偏离 0.72°。以上是 A 相励磁时的定子和转子小齿的位置关系。
 ● B相励磁
其次由 A 相励磁转为 B 相励磁时,B 相磁极磁化成 N 极,与拥有 S极磁性的转子 2 互相吸引,而与拥有 N极磁性的转子 1 相斥。
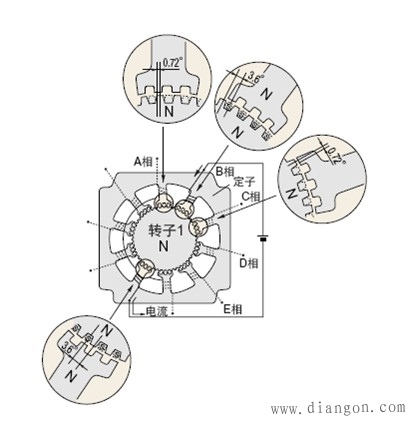 也就是说,从 A 相励磁转换至 B 相励磁时,转子转动 0.72°。由此可知, 励磁相位随 A相→ B相→ C相→ D相→ E相→ A相依次转换,则步进电动机以每次 0.72°做正确的转动。同样的,希望作反方向转动时,只需将励磁顺序倒转,依照 A相→ E相→ D相→ C相→ B相→ A相励磁即可。
0.72°的高分辨率,是取决于定子和转子构造上的机械偏移量,所以不需要编码器等传感器即可正确的定位。下图就5相步进每次的位移量是0.72°进行更详细的说明:
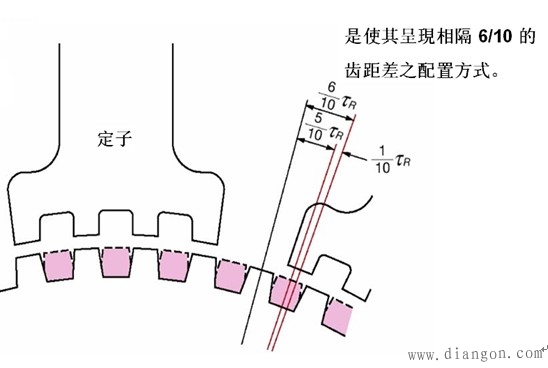 由于第一组定子正好与转子相对应吸引。就势必会导致第二组定子与对应的转子相偏离(定子与转子齿距一样,但是各自所在的2个圆不一样大)。而这个偏离值正好是齿距的十分之一。因此普通5相步进的步距角为:360°/50齿/10=0.72°
高分辨率5相步进的步距角为:360°/100齿/10=0.36°
另外,就停止精度而言, 会影响的只有定子与转子的加工精度、组装精度、及线圈的直流电阻的不同等而已,因此可获得 ±3 分(无负载时)的高停止精度。 实际上步进电动机是由驱动器来进行励磁相的转换,而励磁相的转换时机则是由输入驱动器的脉冲信号所进行。以上举的是 1相位励磁的例子,实际运转时,为有效利用线圈同时进行 4相或 5相励磁的。 |
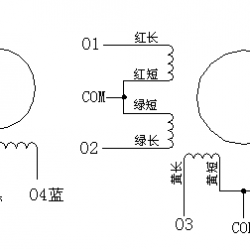 8线步进电机接线方法
8线步进电机接线方法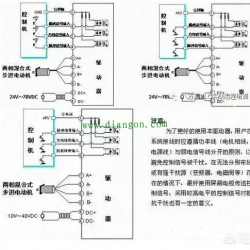 步进电机接线颜色线序定义_步进电机接线图
步进电机接线颜色线序定义_步进电机接线图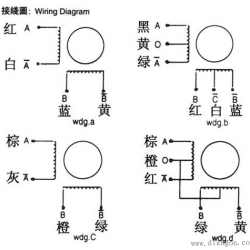 步进电机接线图
步进电机接线图 台达ASD-A2系列伺服驱动器关于AL011报警故
台达ASD-A2系列伺服驱动器关于AL011报警故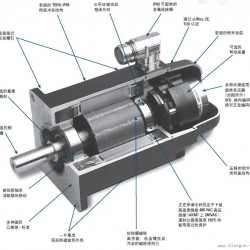 伺服电机的结构图
伺服电机的结构图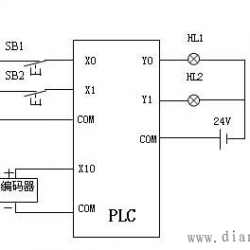 旋转编码器安装接线步骤图解
旋转编码器安装接线步骤图解电工学习网 ( )
GMT+8, 2023-3-22 16:38