
|
在开始PID自整定调整前,整个PID控制回路必须工作在相对稳定的状态。
稳定的PID是指过程变量接近设定值,输出不会不规则的变化,且回路的输出值在控制范围中心附近变化。 问题与解决方法: 1.PID输出总是输出很大的值,并在这一区间内调节变化  .增益(Gain)值太高 .PID扫描时间(sample time)太长(对于快速响应PID的回路) 解决方法:降低增益(Gain)值并且/或选择短一些的扫描时间 2.过程变量超过设定值很多(超调很大)  解决方法:降低积分时间 3.得到一个非常不稳定的PID  .如果用了微分,可能是微分参数有问题 .没有微分,可能是增益(Gain)值太高 解决方法: .调整微分参数到0-1的范围内 .根据回路调节特性将增益值降低,最低可从0.x 开始逐渐增大往上调,直到获得稳定的PID。 |
 PLC输入端和输出端怎么接线
PLC输入端和输出端怎么接线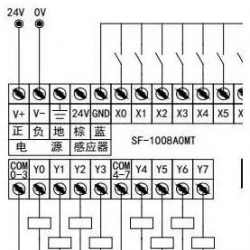 什么是COM端口?PLC中COM端口如何接线?
什么是COM端口?PLC中COM端口如何接线?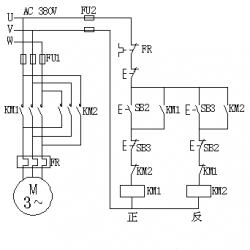 plc控制电动机正反转梯形图
plc控制电动机正反转梯形图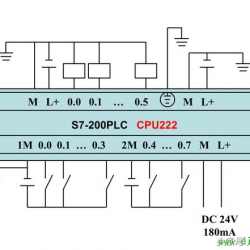 西门子S7-200系列PLC全套接线图
西门子S7-200系列PLC全套接线图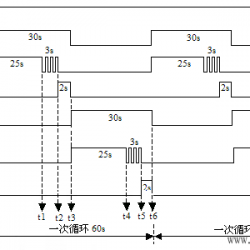 PLC十字路口的交通灯控制编程实例
PLC十字路口的交通灯控制编程实例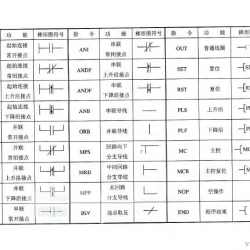 plc基础知识指令27个
plc基础知识指令27个电工学习网 ( )
GMT+8, 2023-5-29 13:06