|
异步电机的数学模型是一个高阶、非线性、强耦合、多变量的系统,通过坐标变换,可以使之降阶并解耦,但是并没有改变其非线性、多变量的本质。在标量控制中,动态性能不够理想,调节器的参数很难设计,究其原因在于仍采用单变量系统的控制思想,而没有从根本上解决非线性、多变量的特殊问题。 矢量控制(vector control),又称磁场定向控制(field-oriented control )是在20世纪70年代初由美国学者和德国学者各自提出的。联邦德国西门子公司的F.Blaschke等提出“感应电机磁场定向的控制原理”。美国P.C.Custman和A.A.Clark 申请的专利“感应电机定子电压的坐标变换控制”,它们的诞生使交流变频调速技术在精细化方面上大大迈进了一步,以后在实践中许多学者进行了大量的工作,经过不断的改进,历经近30年的时间,达到了可与直流调速系统的性能相媲美的程度 从原理上说,矢量控制方式的特征是:它把交流电动机解析成直流电动机一样的转矩发生机构,按照磁场与其正交电流的积就是转矩这一基本的原理,从理论上将电动机的一次电流分离成建立磁场的励磁分量和磁场正交的产生转矩的转矩分量,然后进行控制。其控制思想就是从根本上改造交流电动机,改变其产生转矩的规律,设法在普通的三相交流电动机上模拟直流电动机控制转矩的规律。 矢量变换控制的基本思路,是以产生同样的旋转磁场为准则,建立三相交流绕组电流、两组交流绕组电流和在旋转坐标上的正交绕组直流电流之间的等效关系。 由电动机结构及旋转磁场的基本原理可知,三相固定的对称绕组A、B、C,通过三相正弦平衡交流电流ia、ib、ic时,即产生转速为
实际上,产生旋转磁场不一定非要三相不可,除单相以外,二相、四相…….等任意的多相对称绕组,通过多相平衡电流,都能产生旋转磁场。图(b)所示是两相固定绕组 |
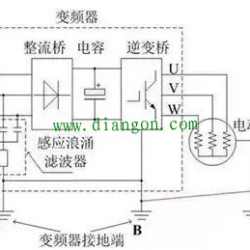 变频器的接线方法图解 教你怎么搞定变频器
变频器的接线方法图解 教你怎么搞定变频器 西门子V20变频器设置步骤
西门子V20变频器设置步骤 变频器过流故障的原因和处理方法
变频器过流故障的原因和处理方法 ABB变频器显示错误代码F0001的原因
ABB变频器显示错误代码F0001的原因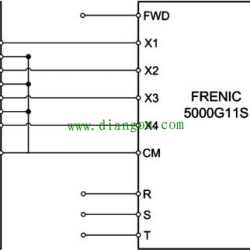 变频器频率调不上去原因和解决方法
变频器频率调不上去原因和解决方法 施耐德变频器通用参数设置步骤
施耐德变频器通用参数设置步骤电工学习网 ( )
GMT+8, 2023-5-27 00:03