|

一、模拟装置的数字化方法
1.直接差分法
(1) 向前差分法

(2) 向后差分法

2.匹配Z变换法

3.双线性变换法
双线性变换法也称突斯汀(Tustin)法,是实际控制系统中比较常用的一种离散化方法,根据Z变换定义:

4.连续化设计方法的一般步骤
第一步:设计连续调节器 。 。
第二步:选择采样周期T。
第三步:计算脉冲传递函数 。 。
第四步:将数字调节器的脉冲传递函数。
第五步:校核、设计完成后,要对整个闭环系统进行校核。
二、数字PID调节器的设计
1.基本数字PID调节器
在连续系统中,模拟PID调节器输入输出之间的关系可用下面的微分方程表示:
2.数字PID调节器的改进
(1)积分算法的改进
积分运算是通过对系统偏差的不断累加而实现的,积分器的积分值代表着系统偏差的面积。
(2)微分算法的改进
改进微分作用常用的方法有两种:
采用微分平滑的方法
采用不完全微分PID的方法

图 数字微分器的特性
| 
 一阶和二阶系统的动态特性参数
一阶和二阶系统的动态特性参数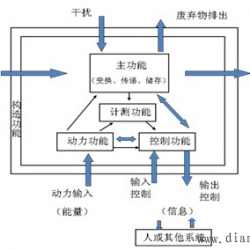 机电一体化系统的功能构成和组成要素
机电一体化系统的功能构成和组成要素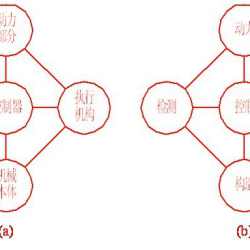 机电一体化系统的基本组成要素
机电一体化系统的基本组成要素 转矩、转动惯量和飞轮转矩的折算
转矩、转动惯量和飞轮转矩的折算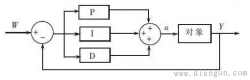 pid控制原理框图
pid控制原理框图 机电传动系统的稳定运行条件
机电传动系统的稳定运行条件






