
|
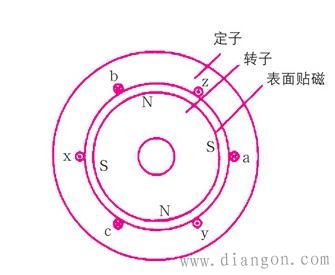
永磁同步电机伺服系统除电机外,系统主要包括驱动单元、位置控制系统、速度控制器、转矩和电流控制器、位置反馈单元、电流反馈单元、通讯接口单元等。 1.永磁式交流同步伺服电机。永磁同步电机永磁式同步电机具有结构简单、体积小、重量轻、损耗小、效率高的特点。和直流电机相比,它没有直流电机的换向器和电刷等需要更多维护给应用带来不便的缺点。相对异步电动机而言则比较简单,定子电流和定子电阻损耗减小,且转子参数可测、控制性能好,但存在最大转矩受永磁体去磁约束,抗震能力差,高转速受限制,功率较小,成本高和起动困难等缺点。与普通同步电动机相比,它省去了励磁装置,简化了结构,提高了效率。永磁同步电机矢量控制系统能够实现高精度、高动态性能、大范围的调速或定位控制,因此永磁同步电机矢量控制系统引起了国内外学者的广泛关注。 2.驱动单元。驱动单元采用三相全桥自控整流,三相正弦PWM电压型逆变器变频的AC-DC-AC结构。设有软启动电路和能耗泄放电路可避免上电时出现过大的瞬时电流以及电机制动时产生很高的泵升电压。逆变部分采用集驱动电路,保护电路和功率开关于一体的智能功率模块(IPM)。 3.控制单元。控制单元是整个交流伺服系统的核心, 实现系统位置控制、速度控制、转矩和电流控制器。具有快速的数据处理能力的数字信号处理器(DSP)被广泛应用于交流伺服系统,集成了丰富的用于电机控制的专用集成电路,如A/D转换器、PWM发生器、定时计数器电路、异步通讯电路、CAN总线收发器以及高速的可编程静态RAM和大容量的程序存储器等。 4.位置控制系统。对于不同的信号,位置控制系统所表现出的特性是不同的。典型的输入信号有三种形式:位置输入(位置阶跃输入)、速度输入(斜坡输入)以及加速度输入(抛物线输入)。位置传感器一般采用高分辨率的旋转变压器、光电编码器、磁编码器等元件。旋转变压器输出两相正交波形,能输出转子的绝对位置,但其解码电路复杂,价格昂贵。磁编码器是实现数字反馈控制性价比较高的器件,还可以依靠磁极变化检测位置,目前正处于研究阶段,其分辨率较低。 5.接口通讯单元。接口包括键盘/显示、控制I/O接口、串行通信等。伺服单元内部及对外的I/O接口电路中,有许多数字信号需要隔离。这些数字信号代表的信息不同,更新速度也不同。 图 永磁同步电机的内部电磁结构
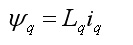
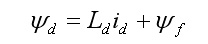
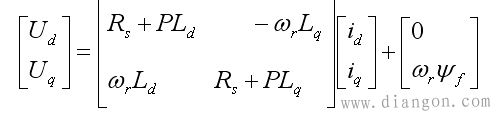
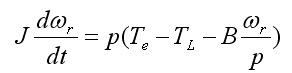
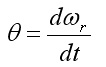
一台永磁同步电机的内部电磁结构如图所示,其中各相绕组的轴线方向也作为各相绕组磁链的正方向,电流的正方向也标在图中,可以看出定子各相的正值电流产生各相的负值磁链,而定子绕组的电压正方向为电动机惯例。在建立数学模型之前做如下的假设:忽略铁心饱和;不计涡流和磁滞损耗;转子上没有阻尼绕组;永磁材料的电导率为0;相绕组中感应电动势波形是正弦波。根据以上的假设和一系列的推导可得到永磁同步电机在d-q坐标系下的数学模型如下。 定子电压方程: 定子磁连方程: 将方程(3)和(4)代入到方程(1)和(2),得到如下方程: 将(5)-(6)合并得到如下方程: 将(7)方程变化成适合在matlab/simulink环境下能搭建模型的方程,即。 以上式子中:p-微分算子,rs-电驱绕组电阻,ωr-转子角速度,ψf-永磁体产生的磁链,是常数,ld,la是d,q线圈的自感。 电磁转矩方程: 电机转子的机械运动方程为: 电机的转子位置角度方程: 而式子中的p为转子极对数;te为电磁转矩;tl 为负载转矩;j为转子转动惯量;b为阻尼系数。 |
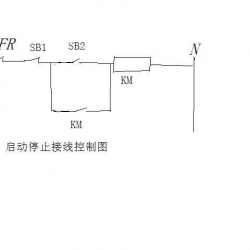 启动停止电路图_启动停止按钮接线图
启动停止电路图_启动停止按钮接线图 三相电动机绕线方法图解
三相电动机绕线方法图解 单相电动机双电容接法_单相双值电容异步电
单相电动机双电容接法_单相双值电容异步电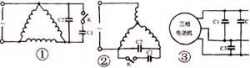 三相电机改单相电机电容接线方法图解
三相电机改单相电机电容接线方法图解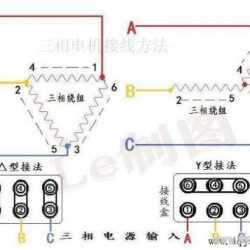 星三角启动原理图_星三角启动接线图-电动机
星三角启动原理图_星三角启动接线图-电动机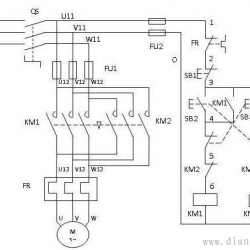 电工必知必懂:电动机正反转控制电路图实物
电工必知必懂:电动机正反转控制电路图实物电工学习网 ( )
GMT+8, 2023-6-18 15:04
 (1)
(1) (2)
(2) (3)
(3) (4)
(4) (5)
(5) (6)
(6) (7)
(7) (8)
(8) (9)
(9) (10)
(10) (11)
(11)