
|
1、选择保持转矩 保持转矩也叫静力矩,是指步进电机通电但没有转动时,定子锁住转子的力矩。由于步进电机低速运转时的力矩接近保持转矩,而步进电机的力矩随着速度的增大而快速衰减,输出功率也随速度的增大而变化,所以说保持转矩是衡量步进电机负载能力最重要的参数之一。比如,一般不加说明地讲到1N.m的步进电机,可以理解为保持转矩是1N.m。 2、选择相数 两相步进电机成本低,步距角最少1.8 度,低速时的震动较大,高速时力矩下降快,适用于高速且对精度和平稳性要求不高的场合;三相步进电机步距角最少1.5度,振动比两相步进电机小,低速性能好于两相步进电机,最高速度比两相步进电机高百分之30至50,适用于高速且对精度和平稳性要求较高的场合;5相步进电机步距角更小,低速性能好于3相步进电机,但成本偏高,适用于中低速段且对精度和平稳性要求较高的场合。 3、选择步进电机 应遵循先选电机后选驱动器原则,先明确负载特性,再通过比较不同型号步进电机的静力矩和矩频曲线,找到与负载特性最匹配的步进电机;精度要求高时,应采用机械减速装置,以使电机工作在效率最高、噪音最低的状态;避免使电机工作在振动区,如若必须则通过改变电压、电流或增加阻尼的方法解决;电源电压方面,建议57电机采用直流24V-36V、86电机采用直流46V、110电机采用高于直流80V;大转动惯量负载应选择机座号较大的电机;大惯量负载、工作转速较高时,电机而应采用逐渐升频提速,以防止电机失步、减少噪音、提高停转时的定位精度;鉴于步进电机力矩一般在40Nm以下,超出此力矩范围,且运转速度大于1000RPM时,即应考虑选择伺服电机,一般交流伺服电机可正常运转于3000RPM,直流伺服电机可可正常运转于10000RPM。 4、选择驱动器和细分数 最好不选择整步状态,因为整步状态时振动较大;尽量选择小电流、大电感、低电压的驱动器;配用大于工作电流的驱动器、在需要低振动或高精度时配用细分型驱动器、对于大转矩电机配用高电压型驱动器,以获得良好的高速性能;在电机实际使用转速通常较高且对精度和平稳性要求不高的场合,不必选择高细分数驱动器,以便节约成本;在电机实际使用转速通常很低的条件下,应选用较大细分数,以确保运转平滑,减少振动和噪音;总之,在选择细分数时,应综合考虑步进电机驱动器的实际运转速度、负载力矩范围、减速器设置情况、精度要求、振动和噪音要求等。 |
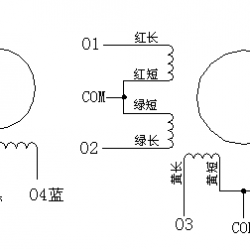 8线步进电机接线方法
8线步进电机接线方法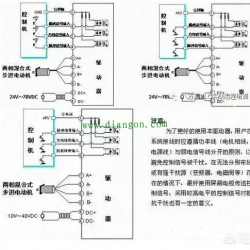 步进电机接线颜色线序定义_步进电机接线图
步进电机接线颜色线序定义_步进电机接线图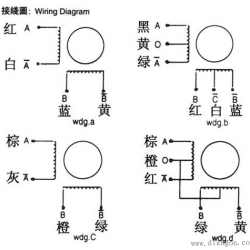 步进电机接线图
步进电机接线图 台达ASD-A2系列伺服驱动器关于AL011报警故
台达ASD-A2系列伺服驱动器关于AL011报警故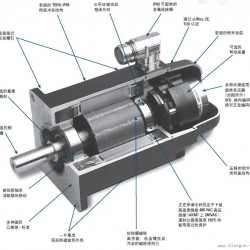 伺服电机的结构图
伺服电机的结构图 旋转编码器安装接线步骤图解
旋转编码器安装接线步骤图解电工学习网 ( )
GMT+8, 2023-4-20 16:41