
|
一、稳定性
伺服系统的稳定性是指当作用在系统上的扰动信号消失后,系统能够恢复到原来的稳定状态下运行,或者在输入的指令信号作用下,系统能够达到新的稳定运行状态的能力。稳定的伺服系统在受到外界干扰或输入指令作用时,其输出响应的过渡过程随着时间的增加而衰减,并最终达到与期望值一致。不稳定的伺服系统,其输出响应的过渡过程或者随时间的增长而增长,或者表现为等幅振荡。因此对伺服系统的稳定性要求是一项最基本的要求,也是伺服系统能够正常运行的最基本条件。 伺服系统的稳定性是系统本身的一种特性,取决于系统的结构及组成元件的参数(如惯性、刚度、阻尼、增益等),与外界作用信号(包括指令信号和扰动信号)的性质或形式无关。一个伺服系统是否稳定,可根据系统的传递函数,采用自动控制理论所提供的各种方法来判别。 对于位置伺服系统,当运动速度很低时,往往会出现一种由摩擦特性所引起的、被称为r。爬行的现象,这也是伺服系统不稳定的一种表现。爬行会严重影响伺服系统的定位精度和位置跟踪精度。 二、精度 服系统的精度是指其输出量复现输入指令信号的精确程度。伺服系统工作过程中通常存在着三种误差,即动态误差、稳态误差和静态误差。稳定的伺服系统对变化的输入信号的动态响应过程往往是一个振荡衰减的过程,在动态响应过程中输出量与输入量之间的偏差称为系统的动态误差。在动态响应过程结束后,即在振荡完全衰减掉之后,输出量对输入量的偏差可能会继续存在,这个偏差称为系统的稳态误差。系统的静态误差则是指由系统组成元件本身的误差及干扰信号所引起的系统输出量对输入量的偏差。 影响伺服系统精度的因素很多,就系统组成元件本身的误差来讲,有传感器的灵敏度和精度、伺服放大器的零点漂移和死区误差、机械装置中的反向间隙和传动误差、各元器件的非线性因素等。此外,伺服系统本身的结构形式和输入指令信号的形式对伺服系统精度都有重要影响。从构成原理上讲,有些系统无论采用多么精密的元器件,也总是存在稳态误差的,这类系统称为有差系统,而有些系统却是无差系统。系统的稳态误差还与输入指令信号的形式有关,当输入信号形式不同时,有时存在误差,有时却误差为零。 精度是对伺服系统的一项重要的性能要求。人们主观上往往总是希望所设计的伺服系统在任何情况下运行时,其输出量的误差都为零,但实际上这是不可能的。在实际设计伺服系统时,只要保证系统的误差满足精度指标要求就可以了。 三、快速响应性 快速响应性是衡量伺服系统动态性能的一项重要指标。快速响应性有两方面含义,一是指动态响应过程中,输出量跟随输入指令信号变化的迅速程度,二是指动态响应过程结束的迅速程度。 伺服系统对输入指令信号的响应速度常由系统的上升时间(输出响应从零上升到稳态值所需要的时间)来表征,它主要取决于系统的阻尼比。阻尼比小则响应快,但阻尼比太小会导致最大超调量(系统输出响应的最大值与稳态值之间的偏差)增大和调整时间(系统的输出响应达到并保持在其稳态值的一个允许的误差范围内所需要的时间)加长,使系统相对稳定性降低。伺服系统动态响应过程结束的迅速程度用系统的调整时间来描述,并取决于系统的阻尼比和无阻尼固有频率。当阻尼比一定时,提高固有频率值可以缩短响应过程的持续时间。 伺服系统的快速响应性、稳定性和精度三项基本性能要求是相互关联的,在进行伺服系统设计时,必须首先满足稳定性要求,然后在满足精度要求的前提下尽量提高系统的快速响应性。 上述三项性能要求是对一般伺服系统的基本性能要求,除此之外,对机电一体化产品中常用的位置伺服系统,还有调速范围、负载能力、可靠性、体积、质量以及成本等方面的要求,这些要求都应在设计时给以综合考虑。 |
 一阶和二阶系统的动态特性参数
一阶和二阶系统的动态特性参数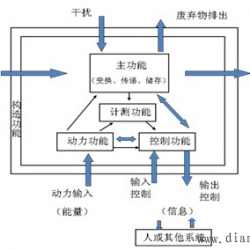 机电一体化系统的功能构成和组成要素
机电一体化系统的功能构成和组成要素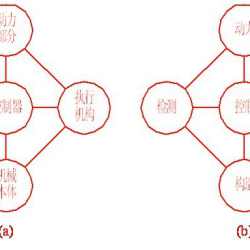 机电一体化系统的基本组成要素
机电一体化系统的基本组成要素 转矩、转动惯量和飞轮转矩的折算
转矩、转动惯量和飞轮转矩的折算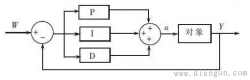 pid控制原理框图
pid控制原理框图 机电传动系统的稳定运行条件
机电传动系统的稳定运行条件电工学习网 ( )
GMT+8, 2023-4-13 22:45