|
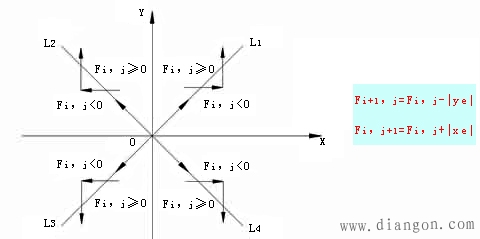
1、逐点比较法直线插补
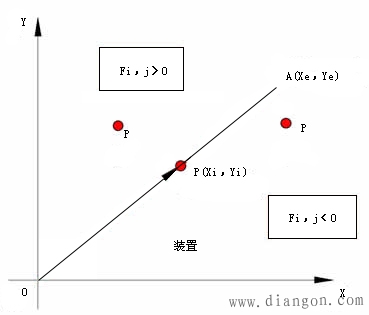
第Ⅰ象限一加工直线,起点坐标原点O,终点坐标为A(xe,ye),则直线方程可表示为
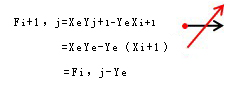
令Fi,j=xeyj-yexi为偏差判别函数,则有: (1)当Fi,j≥0时,向+X方向进给一个脉冲当量,到达点 Pi+1,j,此时xi+1=xi+1,则点Pi+1,j的偏差判别函数Fi+1,j为
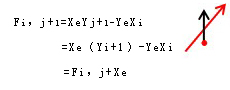
(2)当Fi,j<0时,向+Y方向进给一个脉冲当量,到达点Pi,j+1,此时yj+1=yj+1,则点Pi,j+1的偏差判别函数Fi,j+1为
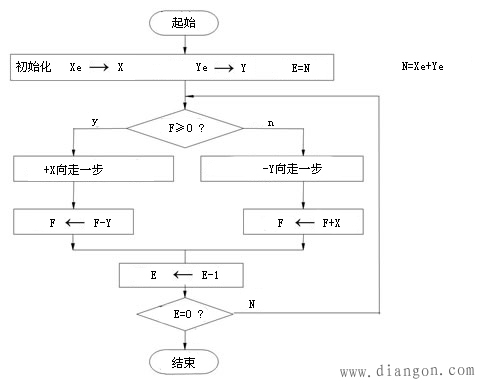
可见,新加工点的偏差Fi+1,j或Fi,j+1是由前一个加工点的偏差Fi,j和终点的坐标值递推出来的,如果按前两式计算偏差,则计算大为简化。 终点判别三种方法: (1)判别插补或进给的总步数:N=Xe+Ye; (2)分别判别各坐标轴的进给步数; (3)仅判断进给步数较多的坐标轴的进给步数。 总结:
第Ⅰ象限直线插补流程图:
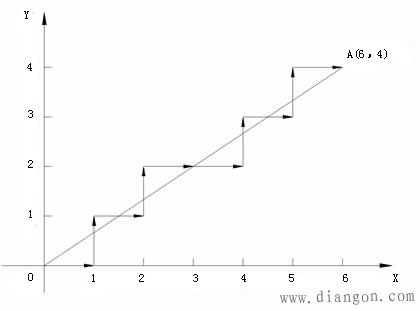
例5-1 设加工第一象限直线,起点为坐标原点O(0,0),终点A(6,4),用逐点比较法对其进行插补,并画出插补轨迹。 终点判别寄存器E=6+4=10,每进给一步减1,E=0时停止插补。
2、其他象限直线插补的方法: 1)分别处理法 分别建立其他三个象限偏差函数计算公式。脉冲进给方向由实际象限决定。 2)坐标变换法(常用) 经坐标变换,按第一象限偏差函数计算公式计算;进给脉冲方向则由实际象限决定。其他各象限直线点的坐标取绝对值,这样,插补计算公式和流程图与第一象限直线一样。
|
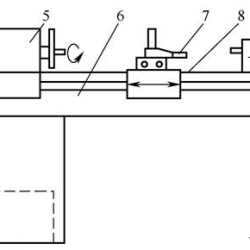 车床的结构与工作原理
车床的结构与工作原理 杠杆百分表的工作原理和使用方法
杠杆百分表的工作原理和使用方法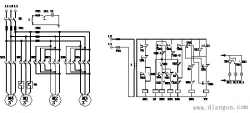 Z3040摇臂钻床的电气控制原理图
Z3040摇臂钻床的电气控制原理图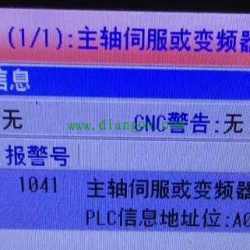 数控机床变频器1041报警故障排除过程
数控机床变频器1041报警故障排除过程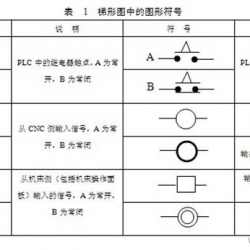 数控机床中的PLC编程步骤
数控机床中的PLC编程步骤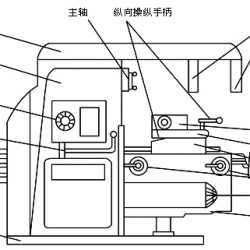 X62W型万能铣床结构简图
X62W型万能铣床结构简图电工学习网 ( )
GMT+8, 2023-4-14 16:07
 ,即
,即