
|
在数控编程时,为了描述机床的运动,简化程序编制的方法及保证纪录数据的互换性,数控机床的坐标系和运动方向均已标准化,ISO和我国都拟定了命名的标准。 通过这一部分的学习,能够掌握机床坐标系、编程坐标系、加工坐标系的概念,具备实际动手设置机床加工坐标系的能力。 1、坐标和运动方向命名原则 特规定:永远假定刀具相对于静止的工件坐标系运动。 2、标准坐标系的规定 为确定机床的运动方向,移动的距离,要在机床上建立一个坐标系——标准坐标系(机床坐标系)。编制程序时,以该坐标系来规定运动方向和距离。标准机床坐标系中X、Y、Z坐标轴的相互关系用右手笛卡尔直角坐标系决定。 3、运动方向的确定 (1)Z坐标: Z坐标的运动方向是由传递切削动力的主轴所决定的,即平行于主轴轴线的坐标轴即为Z坐标,Z坐标的正向为刀具离开工件的方向 (2)X坐标
|
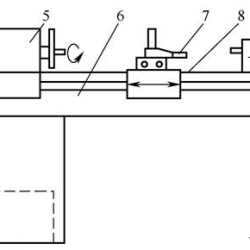 车床的结构与工作原理
车床的结构与工作原理 杠杆百分表的工作原理和使用方法
杠杆百分表的工作原理和使用方法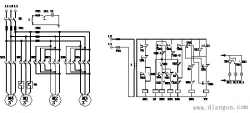 Z3040摇臂钻床的电气控制原理图
Z3040摇臂钻床的电气控制原理图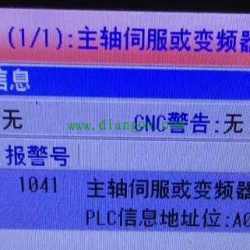 数控机床变频器1041报警故障排除过程
数控机床变频器1041报警故障排除过程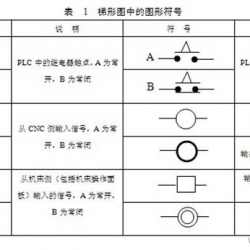 数控机床中的PLC编程步骤
数控机床中的PLC编程步骤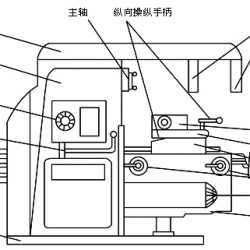 X62W型万能铣床结构简图
X62W型万能铣床结构简图电工学习网 ( )
GMT+8, 2023-4-5 08:33





