|
在实际应用中必须设法予以简化,简化的基本方法是坐标变换。
1. 交流电机的物理模型
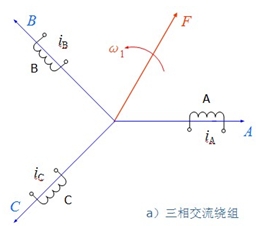
直流电机物理模型简单(励磁绕组d轴上,电枢绕组在q轴上),如果能将交流电机的物理模型(见下图)等效地变换成类似直流电机的模式,分析和控制就可以大大简化。坐标变换正是按照这条思路进行的。 在这里,不同电机模型彼此等效的原则是:在不同坐标下所产生的磁动势完全一致。
(1)交流电机绕组的等效物理模型 |
 |
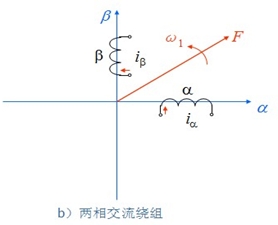
| (2)等效的两相交流电机绕组 |
 |
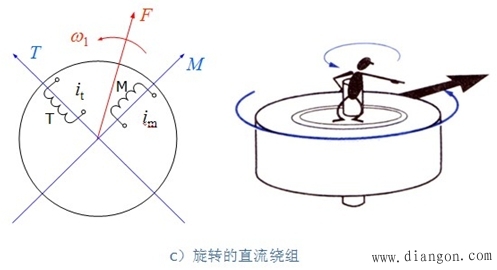
| (3)旋转的直流绕组与等效直流电机模型 |
 |
|
再看图c中的两个匝数相等且互相垂直的绕组 M 和 T,其中分别通以直流电流 和 和 ,产生合成磁动势 F ,其位置相对于绕组来说是固定的。 ,产生合成磁动势 F ,其位置相对于绕组来说是固定的。
如果让包含两个绕组在内的整个铁心以同步转速旋转,则磁动势 F 自然也随之旋转起来,成为旋转磁动势。
把这个旋转磁动势的大小和转速也控制成与图 a 和图 b 中的磁动势一样,那么这套旋转的直流绕组也就和前面两套固定的交流绕组都等效了。当观察者也站到铁心上和绕组一起旋转时,在他看来,M 和 T 是两个通以直流而相互垂直的静止绕组。
如果控制磁通的位置在 M 轴上,就和直流电机物理模型没有本质上的区别了。这时,绕组M相当于励磁绕组,T 相当于伪静止的电枢绕组。
等效的概念
由此可见,以产生同样的旋转磁动势为准则,图a的三相交流绕
组、图b的两相交流绕组和图c中整体旋转的直流绕组彼此等效。或者说,在三相坐标系下的 ,在两相坐标系下的 ,在两相坐标系下的 和在旋转两相坐标系下的直流 和在旋转两相坐标系下的直流 是等效的,它们能产生相同的旋转磁动势。 是等效的,它们能产生相同的旋转磁动势。
现在的问题是,如何求出 与 与 和 和 之间准确的等效关系,这就是坐标变换的任务。 之间准确的等效关系,这就是坐标变换的任务。
2. 三相--两相变换(3/2变换)
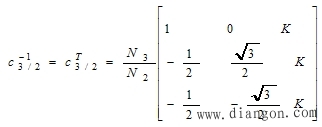
现在先考虑上述的第一种坐标变换——在三相静止绕组A、B、C和两相静止绕组 之间的变换,或称三相静止坐标系和两相静止坐标系间的变换,简称 3/2 变换。 之间的变换,或称三相静止坐标系和两相静止坐标系间的变换,简称 3/2 变换。
三相和两相坐标系与绕组磁动势的空间矢量 : |
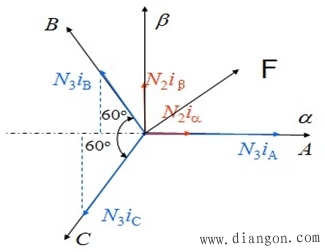 |
| 设磁动势波形是正弦分布的,当三相总磁动势与二相总磁动势相等时,两套绕组瞬时磁动势在轴上的投影都应相等, |
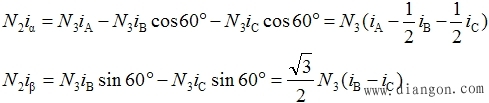 |
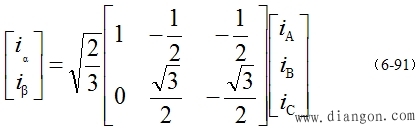
| 写成矩阵形式,得: |
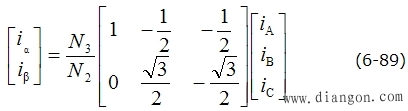 |
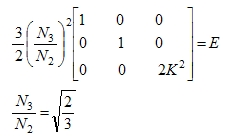
| 考虑变换前后总功率不变,在此前提下,可以证明匝数比应为: |
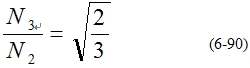 |
为求两项到三项的变换阵将三项到两项的变换阵增广成可逆的方阵,物理意义在两项系统上人为加入零轴磁动势 并定义 并定义 |
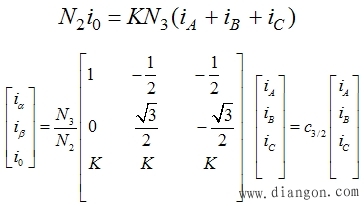 |
| 满足功率不变的条件 |
 |
 可以求得如下关系: 可以求得如下关系: |
 |
|
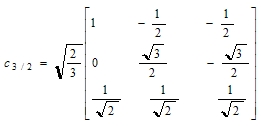
这表明保持坐标变换前后的功率不变,又要维持磁链相同,变换 前后两项绕组每相匝数应为原三项绕组匝数的 倍于此同时 倍于此同时 利用上述关系得三项/两项变换方阵: 利用上述关系得三项/两项变换方阵: |
 |
| 如要从两相坐标系变换到三相坐标系2/3变换可求反变换: |
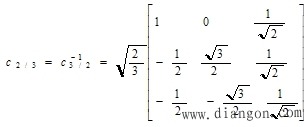 |
| N3 /N2 值代入式(6-89),得: |
 |
|
3. 两相—两相旋转变换(2s/2r变换)
从上图等效的交流电机绕组和直流电机绕组物理模型的图 b 和图 c 中从两相静止坐标系到两相旋转坐标系 M、T 变换称作两相—两相旋转变换,简称 2s/2r 变换,其中 s 表示静止,r 表示旋转。
把两个坐标系画在一起,即得下图。
两相静止和旋转坐标系与磁动势(电流)空间矢量 |
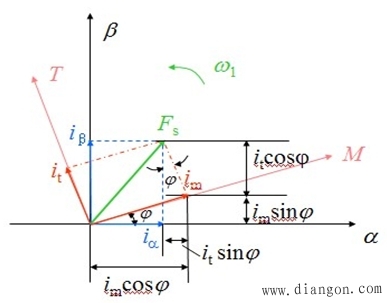 |
| 2s/2r变换公式 |
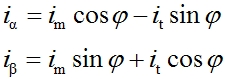 |
两相旋转—两相静止坐标系的变换矩阵
写成矩阵形式,得: |
 |
式中 |
是两相旋转坐标系变换到两相静止坐标系的变换阵。
对式(6-96)两边都左乘以变换阵的逆矩阵,即得 : |
 |
 |
两相静止—两相旋转坐标系的变换矩阵
则两相静止坐标系变换到两相旋转坐标系的变换阵是 : |
 |
|
电压和磁链的旋转变换阵也与电流(磁动势)旋转变换阵相同。 |

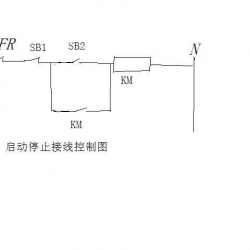 启动停止电路图_启动停止按钮接线图
启动停止电路图_启动停止按钮接线图 三相电动机绕线方法图解
三相电动机绕线方法图解 单相电动机双电容接法_单相双值电容异步电
单相电动机双电容接法_单相双值电容异步电 三相电机改单相电机电容接线方法图解
三相电机改单相电机电容接线方法图解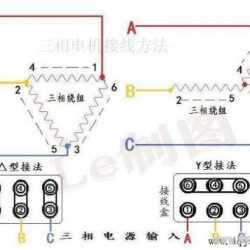 星三角启动原理图_星三角启动接线图-电动机
星三角启动原理图_星三角启动接线图-电动机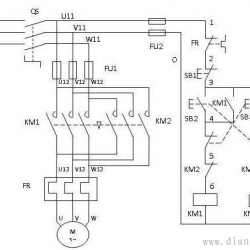 电工必知必懂:电动机正反转控制电路图实物
电工必知必懂:电动机正反转控制电路图实物