
|
3、弹性变形系数的折算 机械系统中各元件在工作时受力或力矩的作用,将产生轴向伸长、压缩或扭转等弹性变形,这些变形将影响到整个系统的精度和动态特性。建模时要将其折算成相应的扭转刚度系数或轴向刚度系数。 上例中,应先将各轴的扭转角都折算到轴I上来,丝杠与工作台之间的轴向弹性变形会使轴Ⅲ产生一个附加扭转角,也应折算到轴I上,然后求出轴I的总扭转刚度系数。同样,当系统在无阻尼状态下,
图2 弹性变形的等效图 (1)轴向刚度的折算 当系统承担负载后,丝杠螺母副和螺母座都会产生轴向弹性变形,图2是它的等效作用图。在丝杠左端输入转矩T3的作用下,丝杠和工作台之间的弹性变形为 所以 式中 K′——附加扭转刚度系数 (2)扭转刚度系数的折算 设 由于丝杠和工作台之间轴向弹性变形使轴Ⅲ附加了一个扭转角 将 将各轴的扭转角折算到轴I上得轴I的总扭转角 将
式中 4、建立系统的数学模型 根据以上的参数折算,建立系统动力平衡方程和推导数学模型。 设输入量为轴I的输入转角Xi;输出量为工作台的线位移Xo。根据传动原理,把Xo折算成轴I的输出角位移 又因为 因此,动力平衡关系可以写成下式
这就是机床进给系统的数学模型,它是一个二阶线性微分方程。其中
式中 将S=j
图3 二阶系统单位阶跃响应曲线
|
 一阶和二阶系统的动态特性参数
一阶和二阶系统的动态特性参数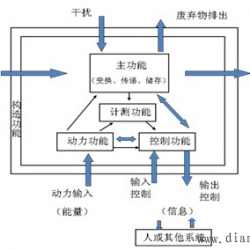 机电一体化系统的功能构成和组成要素
机电一体化系统的功能构成和组成要素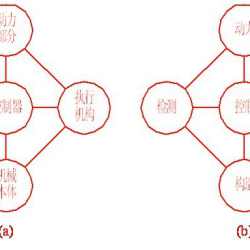 机电一体化系统的基本组成要素
机电一体化系统的基本组成要素 转矩、转动惯量和飞轮转矩的折算
转矩、转动惯量和飞轮转矩的折算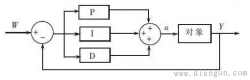 pid控制原理框图
pid控制原理框图 机电传动系统的稳定运行条件
机电传动系统的稳定运行条件电工学习网 ( )
GMT+8, 2023-5-3 18:17
 、
、 、
、 等输入转矩都用来克服机构的弹性变形。
等输入转矩都用来克服机构的弹性变形。 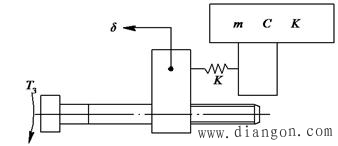
 ,对应的丝杠附加扭转角为
,对应的丝杠附加扭转角为 。根据动力平衡原理和传动关系,在丝杠轴Ⅲ上有:
。根据动力平衡原理和传动关系,在丝杠轴Ⅲ上有: 
 (9)
(9)  、
、 、
、 分别为轴I、Ⅱ、Ⅲ在输入转矩
分别为轴I、Ⅱ、Ⅲ在输入转矩
 Ⅲ为:
Ⅲ为: 

 值代入上式有:
值代入上式有:
 ——折算到轴I上的总扭转刚度系数
——折算到轴I上的总扭转刚度系数  (11)
(11)  。在轴I上根据动力平衡原理有
。在轴I上根据动力平衡原理有  (12)
(12)  (13)
(13) 
 、
、 、
、
 ——系统的固有频率,
——系统的固有频率, =
= (16)
(16)  ——系统的阻尼比,
——系统的阻尼比, (17)
(17)  代入(15)可求出A(
代入(15)可求出A( (
(