
|
3、弹性变形的影响 机械传动系统的结构弹性变形是引起系统不稳定和产生动态滞后的主要因素,稳定性是系统正常工作的首要条件。当伺服电动机带动机械负载按指令运动时,机械系统所有的元件都会因受力而产生程度不同的弹性变形。由式(14)、(15)知,其固有频率与系统的阻尼、惯量、摩擦、弹性变形等结构因素有关。当机械系统的固有频率接近或落入伺服系统带宽之中时,系统将产生谐振而无法工作。因此为避免机械系统由于弹性变形而使整个伺服系统发生结构谐振,一般要求系统的固有频率 采用弹性模量高的材料,合理选择零件的截面形状和尺寸、对轴承、丝杠等支承件施加预加载荷等方法均可以提高零件的刚度。在多级齿轮传动中,增大末级减速比可以有效的提高末级输出轴的折算刚度。 另外,在不改变机械结构固有频率的情况下,通过增大阻尼也可以有效地抑制谐振。因此,许多机电一体化系统设有阻尼器以使振荡迅速衰减。 4、惯量的影响 转动惯量对伺服系统的精度、稳定性、动态响应都有影响。惯量大,系统的机械常数大,响应慢。由式(17)可以看出,惯量大,
|
 一阶和二阶系统的动态特性参数
一阶和二阶系统的动态特性参数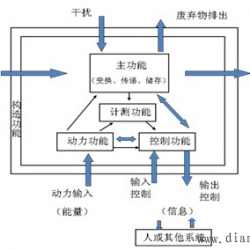 机电一体化系统的功能构成和组成要素
机电一体化系统的功能构成和组成要素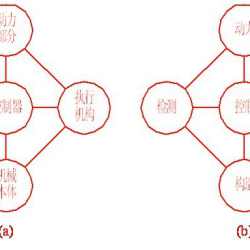 机电一体化系统的基本组成要素
机电一体化系统的基本组成要素 转矩、转动惯量和飞轮转矩的折算
转矩、转动惯量和飞轮转矩的折算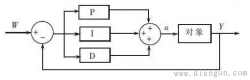 pid控制原理框图
pid控制原理框图 机电传动系统的稳定运行条件
机电传动系统的稳定运行条件电工学习网 ( )
GMT+8, 2023-7-24 02:43
 n要远远高于伺服系统的工作频率。通常采取提高系统刚度、增加阻尼、调整机械构件质量和自振频率等方法来提高系统抗振性,防止谐振的发生。
n要远远高于伺服系统的工作频率。通常采取提高系统刚度、增加阻尼、调整机械构件质量和自振频率等方法来提高系统抗振性,防止谐振的发生。  值将减小,从而使系统的振荡增强,稳定性下降;由式(16)可知,惯量大,会使系统的固有频率下降,容易产生谐振,因而限制了伺服带宽,影响了伺服精度和响应速度。惯量的适当增大只有在改善低速爬行时有利。因此,机械设计时在不影响系统刚度的条件下,应尽量减小惯量。
值将减小,从而使系统的振荡增强,稳定性下降;由式(16)可知,惯量大,会使系统的固有频率下降,容易产生谐振,因而限制了伺服带宽,影响了伺服精度和响应速度。惯量的适当增大只有在改善低速爬行时有利。因此,机械设计时在不影响系统刚度的条件下,应尽量减小惯量。